PID optimization control method of four-rotor aircraft
A quadrotor aircraft, optimized control technology, applied in the direction of attitude control, adaptive control, general control system, etc., can solve problems such as strong coupling, unstable dynamic characteristics, etc., and achieve the effect of controller parameter optimization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The invention discloses a PID optimization control method of a quadrotor aircraft, comprising the following steps:
[0052] 1) Dynamic modeling of the aircraft;
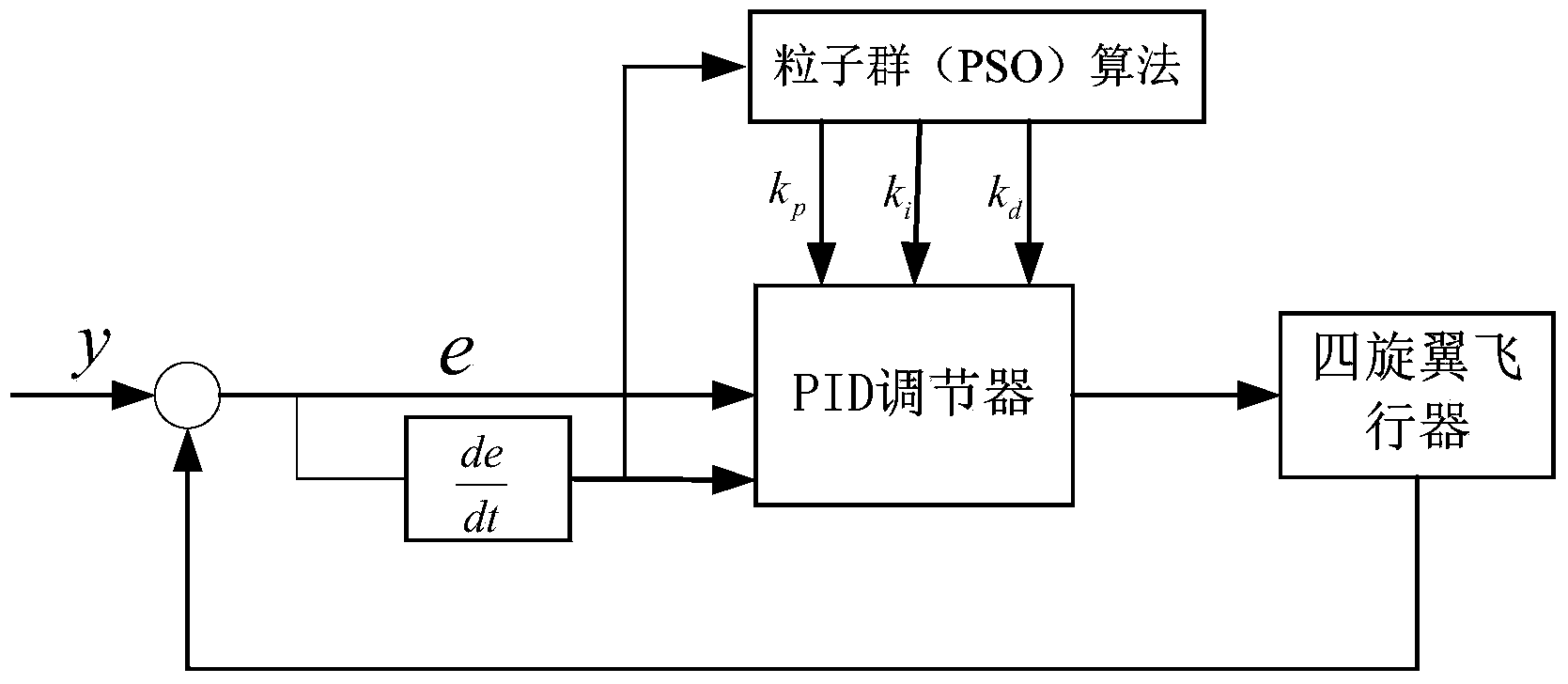
[0053] 2) Design the PID controller on the basis of the dynamic model;
[0054] 3) Use particle swarm optimization algorithm to optimize the parameters of PID controller;
[0055] 4) The movement of particles in the standard particle swarm optimization algorithm changes the direction and speed of particles based on its own local optimum and global optimum, and it is easy to fall into local optimum, especially for multi-peak functions. In order to better optimize the control of PID parameters, the improved particle swarm algorithm and genetic algorithm are combined to further optimize the controller parameters;
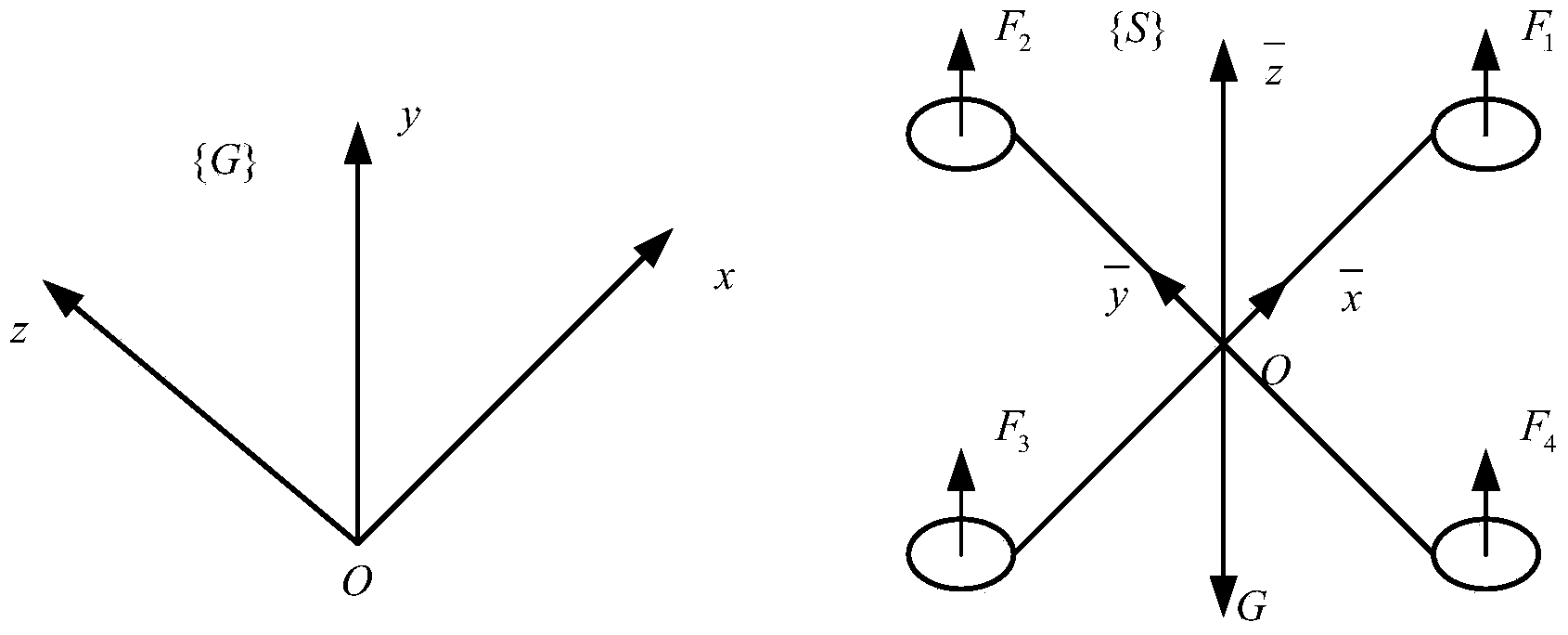
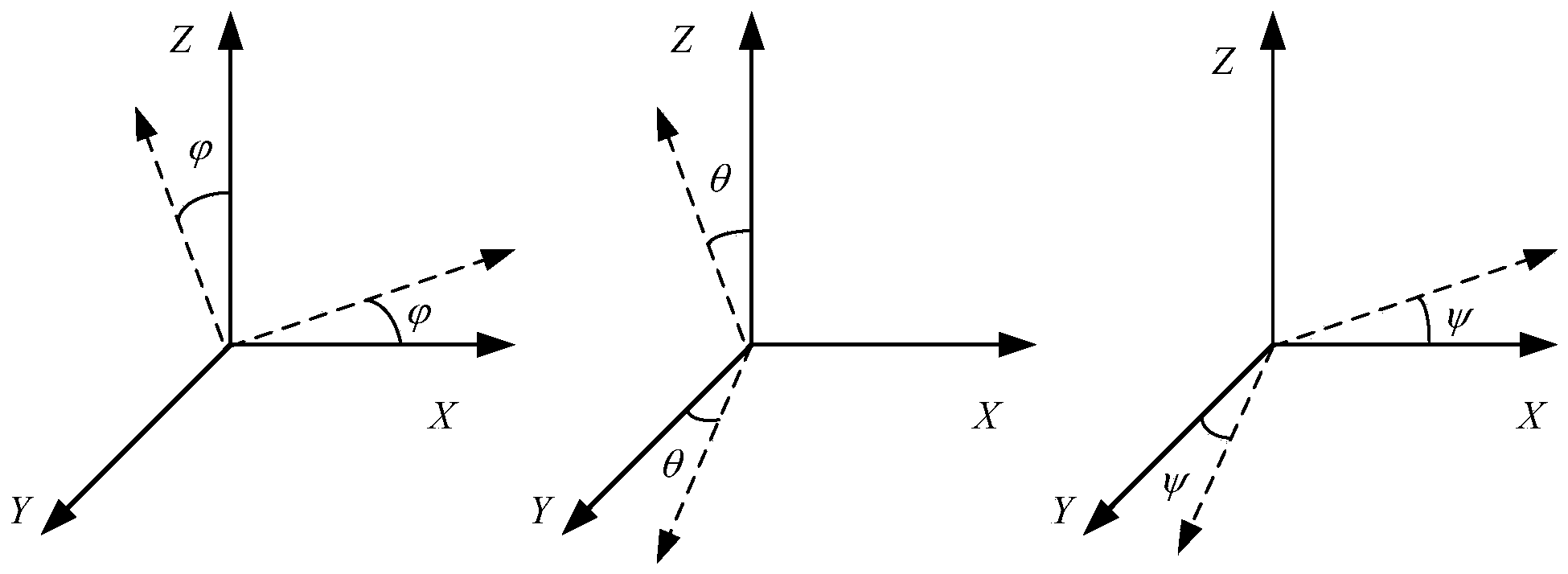
[0056] The dynamic modeling of the aircraft in the preceding step 1) is completed according to the following steps:
[0057] In order to obtain the mathematical model of the quadrotor aircraft, two ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com