Unmanned aerial vehicle ground target real-time positioning method with automatic extraction and gathering of multiple control points
An automatic extraction, multi-control point technology, applied in the field of remote sensing image processing, can solve the problems of low positioning accuracy, difficult to meet the needs of real-time, high-precision target positioning, etc., to achieve good real-time performance, high target positioning accuracy, and conflict resolution Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
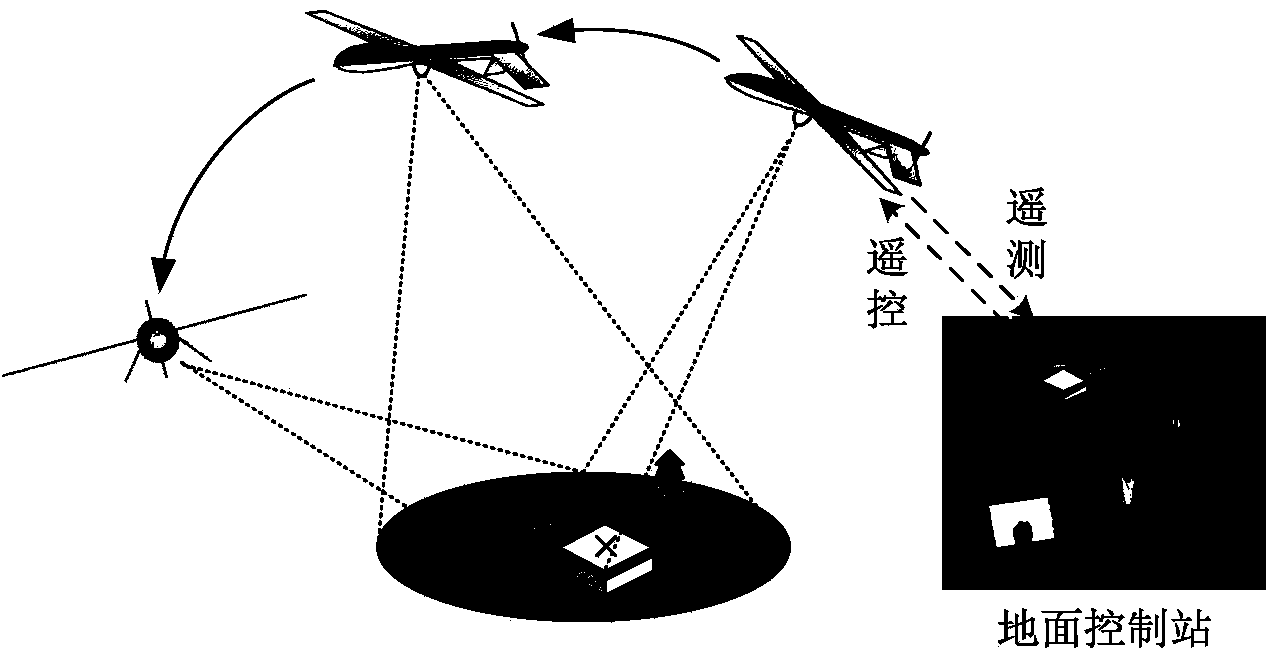
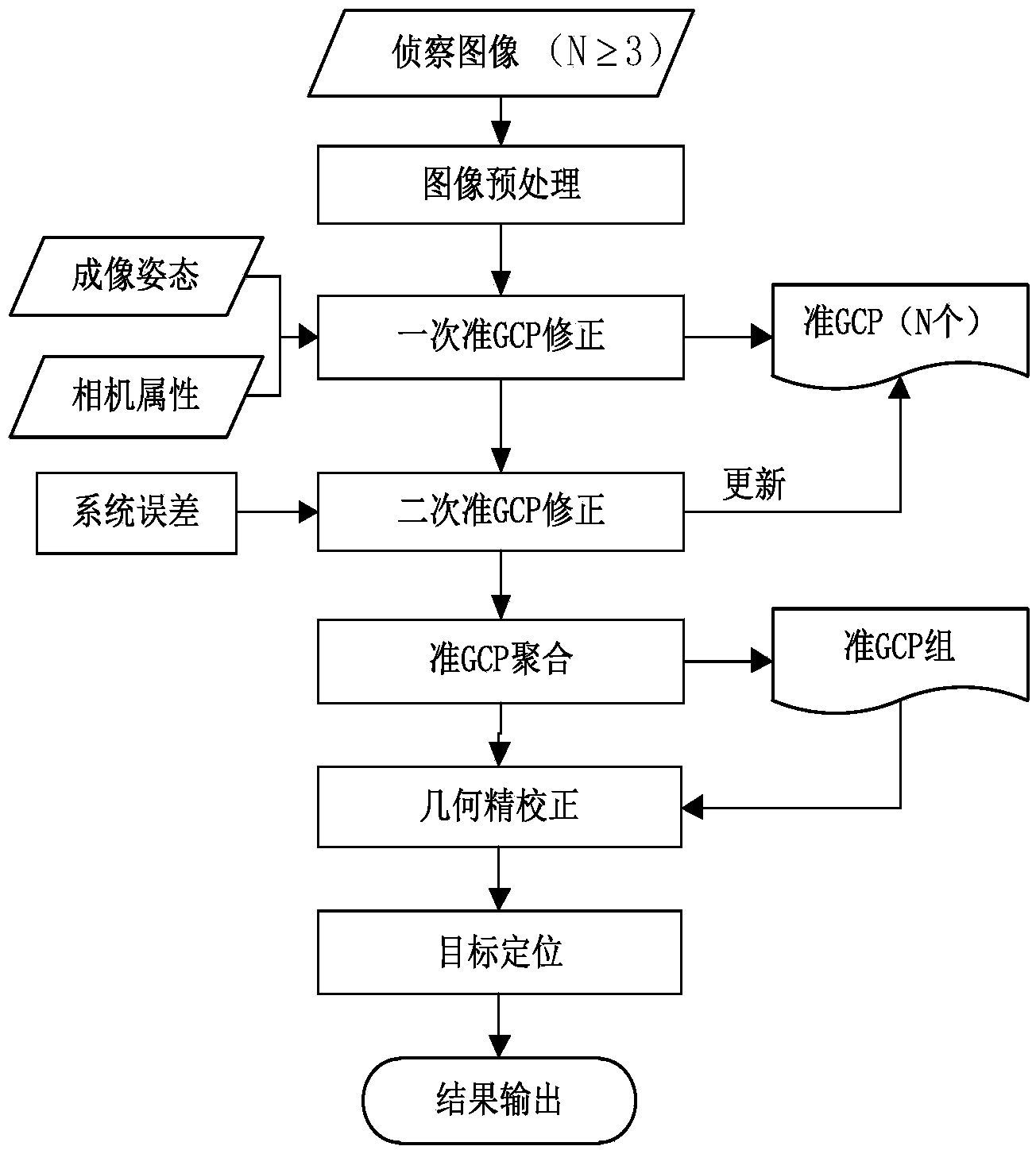
[0032] The invention is a real-time positioning method for UAV ground targets with automatic extraction and aggregation of multiple control points, through the steps of quasi-GCP extraction, correction, aggregation and geometric correction of multiple reconnaissance images acquired by the reconnaissance target and its adjacent areas , to realize the geographic positioning of the reconnaissance target. Method models such as figure 1 As shown, with the assistance of the controllers of the ground command and control station, the UAV reconnaissance equipment will download the captured target image, imaging position, attitude information and other telemetry data to the ground command and control station, and the ground image processing platform will process The reconnaissance images and related telemetry data are analyzed to obtain the target's geographic coordinates. figure 2 The overall flowchart of the method is given, and the specific implementation method includes the follow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com