Workpiece scanning imaging method based on laser sensor and robot
A laser sensor, scanning imaging technology, applied in the direction of instruments, optical devices, measuring devices, etc., can solve problems such as performance interference, achieve flexible use, strong practicability, and solve the effects of insufficient anti-interference performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
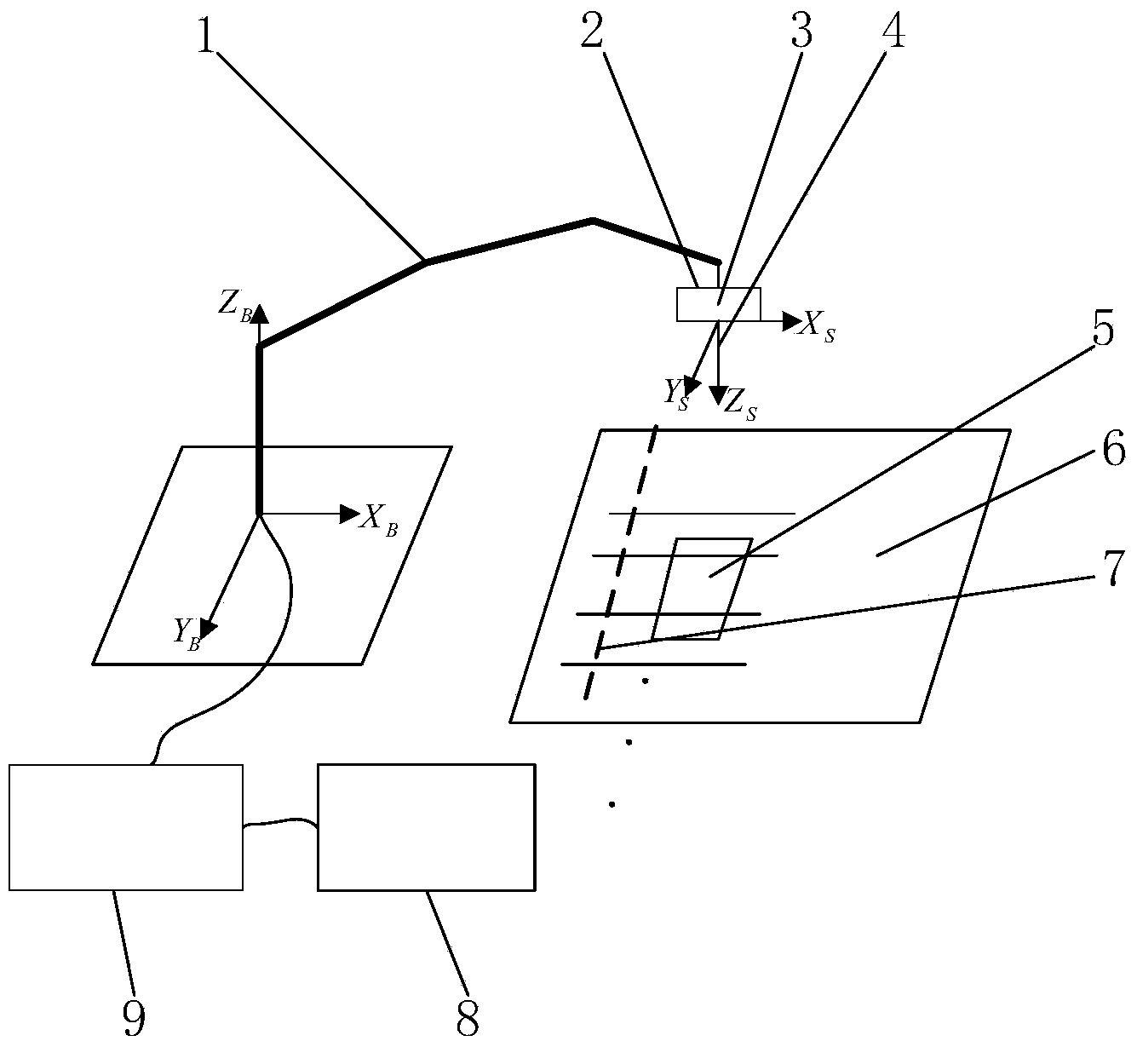
[0038] A striped laser sensor is installed at the end of the robot. The sensor and the robot (including the robot controller) are fixedly installed on the end flange of the robot to jointly complete the measurement task of obtaining the contour point data of the workpiece obtained by laser scanning. .
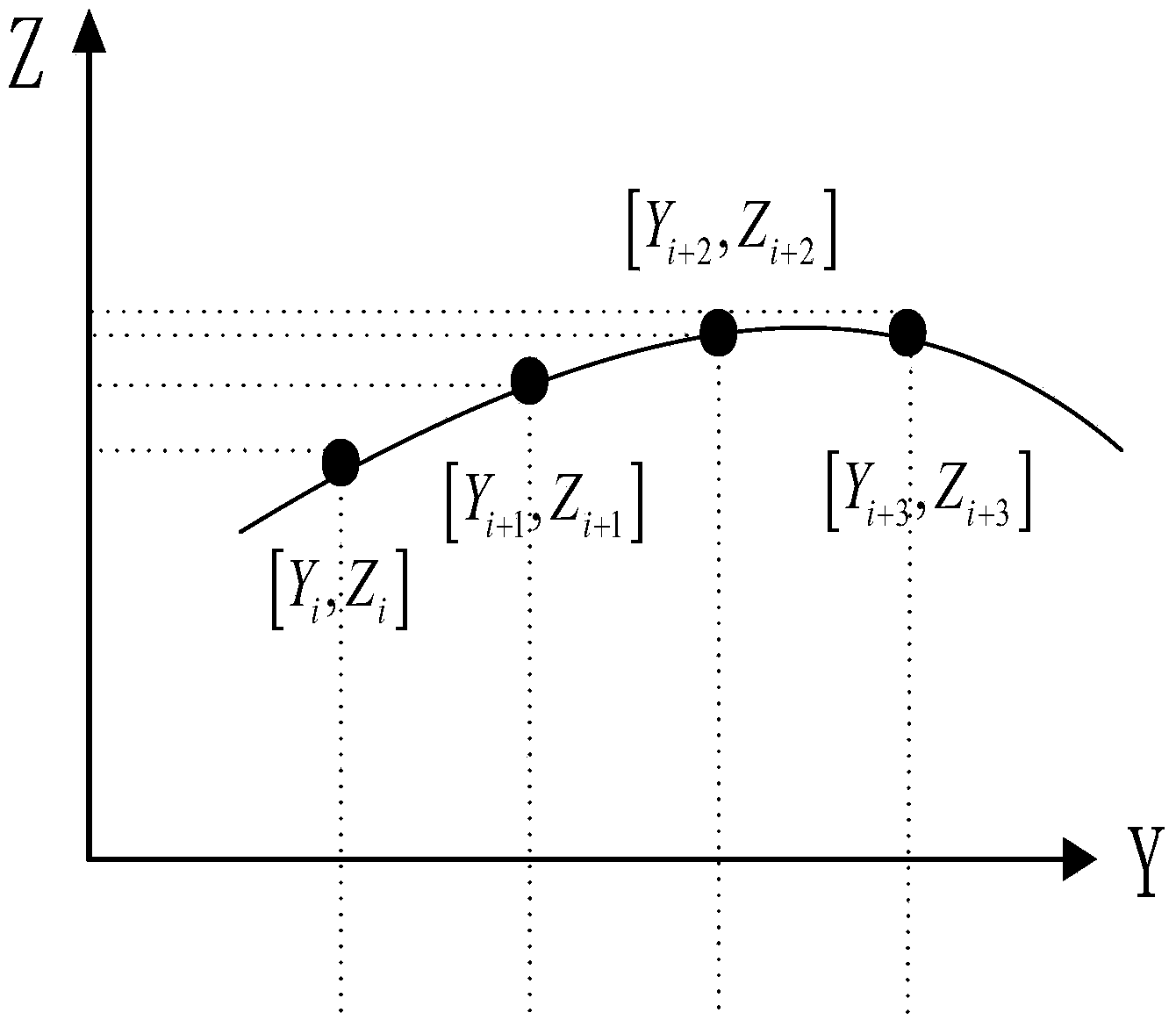
[0039] When the laser beam emitted by the stripe laser sensor used in this method is projected on the surface of the object to be measured, the laser beam will form an image consistent with the surface contour of the object to be measured. On the laser beam, there are a series of continuous and uniform P Laser sampling points, and then the sensor returns the P sampling points in the laser beam relative to the Z-axis and X-axis coordinate values in the sensor measurement coordinate system.
[0040] The computer communicates with the laser sensor and the robot controller to complete the task of collecting and processing laser scanning point data and then imaging the contour of the w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com