Exoskeleton finger rehabilitation robot system and working method based on EEG control
A rehabilitation robot and exoskeleton technology, applied in the field of medical devices, can solve the problems of large structure, unfavorable loading and unloading, complex transmission mode of finger robot, etc., and achieve the effect of solving complex installation, reducing size, and efficient plastic recovery.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
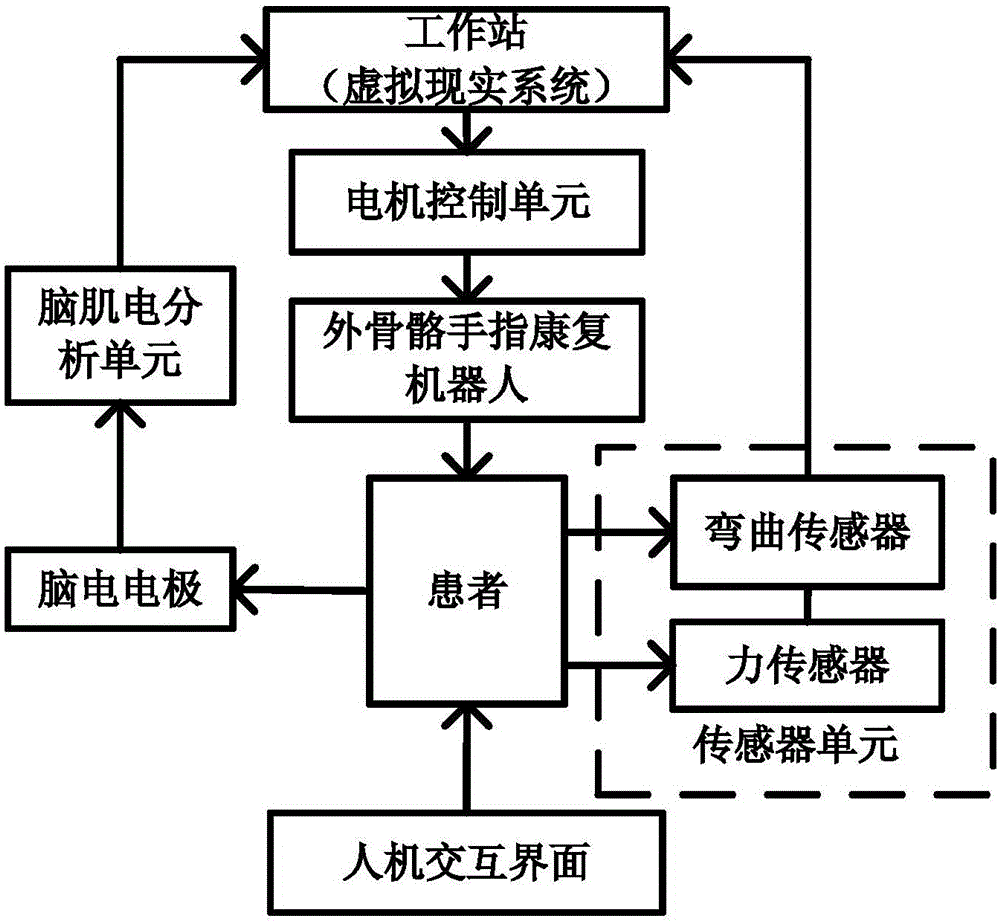
[0037] Embodiment: a kind of exoskeleton finger rehabilitation robot system based on EEG control (see figure 1 ), characterized in that it includes a workstation, a motor control unit, an exoskeleton finger rehabilitation robot, an EEG electrode, an EEG analysis unit, a sensor unit, and a human-computer interaction interface; wherein the workstation receives an EEG analysis unit and a sensor The output signal of the unit, its output terminal is connected to the input terminal of the motor controller; the input terminal of the exoskeleton finger rehabilitation robot is connected to the output terminal of the motor control unit, and its output terminal transmits the signal to the patient; the input terminal of the sensor unit Receive the patient's pathogenic signal, and its output is connected to the input of the workstation; the input of the EEG electrode measures the patient's brain wave signal, and its output is connected to the input of the EEG analysis unit; the human-comput...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com