High-precision vehicle positioning method for fusing multi-source information under GPS (global positioning system) blind area and device
A multi-source information and positioning method technology, which is applied in the field of high-precision vehicle positioning based on multi-source information fusion in GPS blind areas, can solve problems such as difficulty in adapting to maneuvering targets, inability to use GPS positioning, and GPS signal blind areas
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0104] The inventor has carried out experiment with the inventive method and GPS positioning method, and experimental process is as follows:
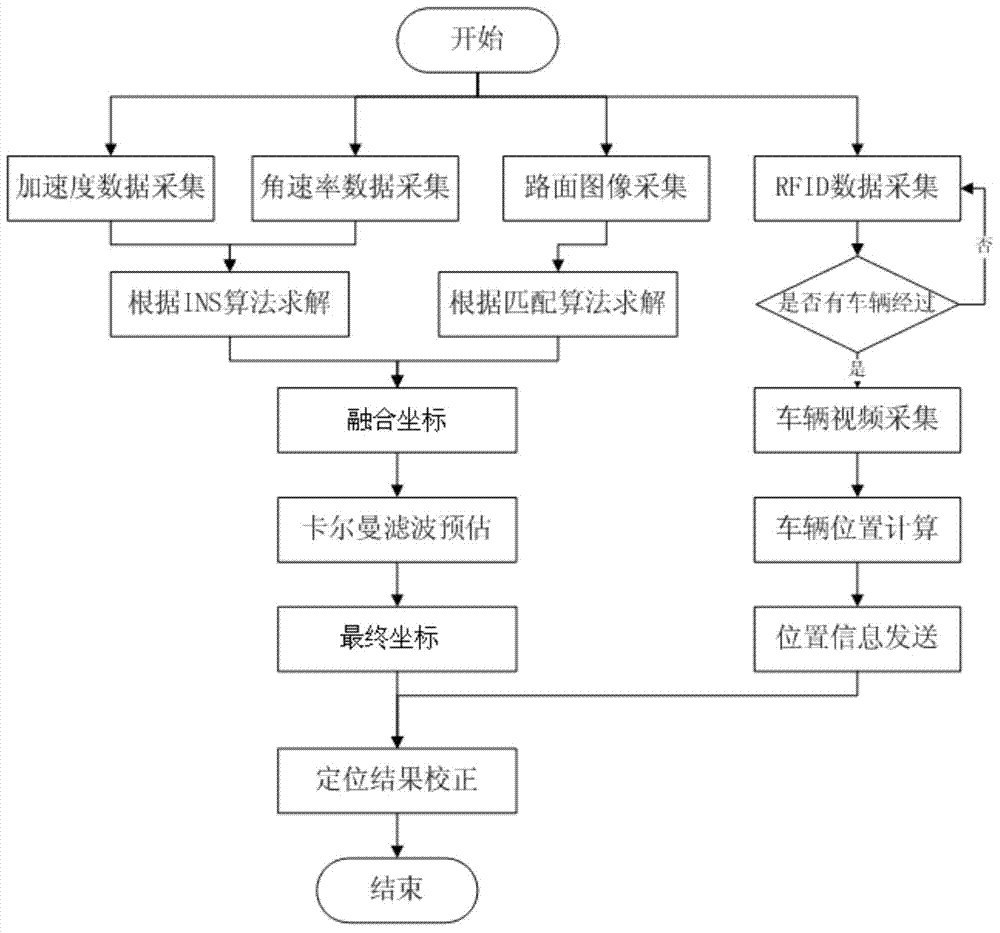
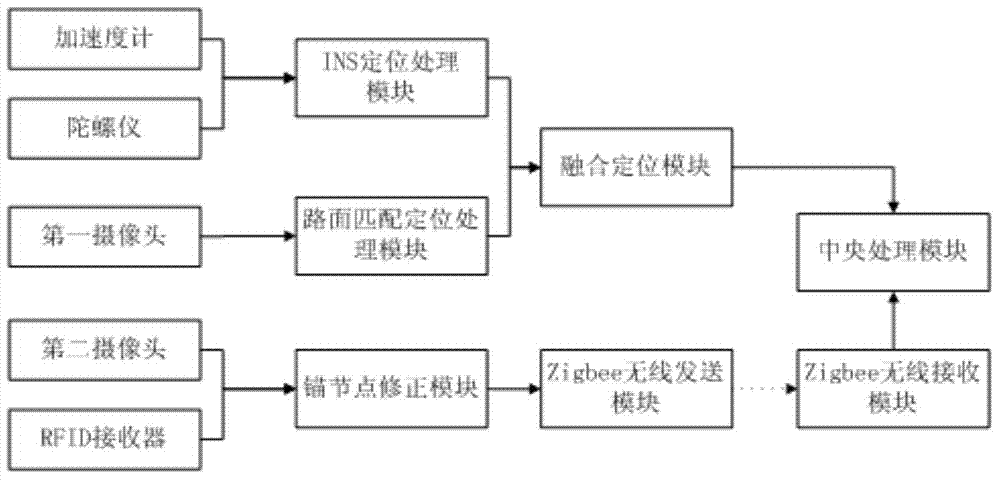
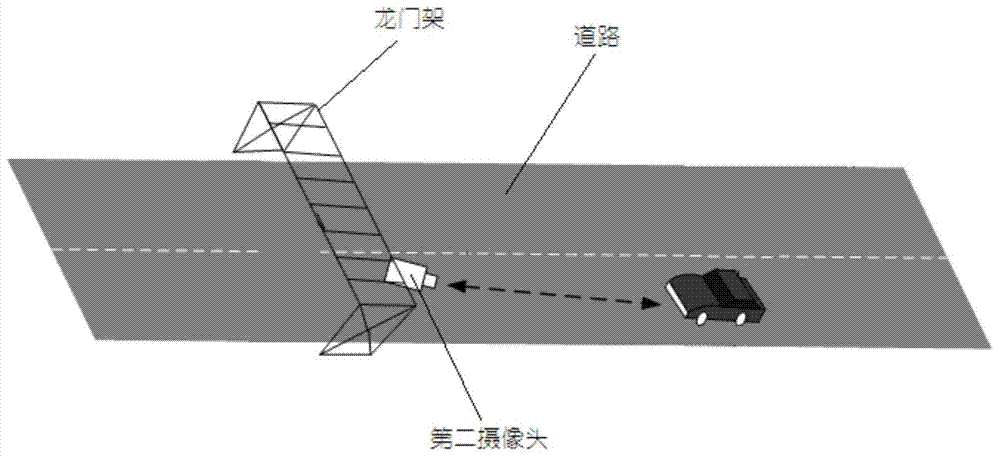
[0105] The inventor conducted a test in a certain automobile proving ground. Using the above method, a gantry and a second camera were installed every 5km on the runway, and a gyroscope and an accelerometer were installed inside the vehicle to obtain the angular rate and acceleration, and installed on the outer section of the vehicle The first camera shoots the road surface, and the test is carried out using the above method. The final test results are as follows: Figure 6 shown. The line marked with a triangle is the trajectory obtained by this method, and the line marked with a circle is the actual trajectory of the vehicle. From Figure 6 It can be seen that the trajectory diagram of the triangle line and the circle line is almost completely consistent, which proves that the positioning effect is quite ideal, and the actual effect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com