Autonomous obstacle crossing programming method of deicing and line inspecting robot for high-voltage transmission line
A high-voltage transmission line and line inspection robot technology, which is applied to overhead lines/cable equipment, manipulators, program-controlled manipulators, etc., can solve complex planning decisions, high-voltage transmission lines are staggered and disordered, and dynamic changes affect the normal operation of deicing line inspection robots. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0088] The present invention will be further described below in conjunction with the accompanying drawings and specific implementation examples.
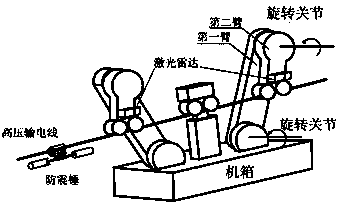
[0089] Such as figure 1 As shown, the present invention is an autonomous obstacle planning method for a high-voltage transmission line deicing inspection robot, including the following steps:
[0090] Step 1: Use the laser radar installed on the end of the robot arm to detect the surrounding environment information, and obtain the obstacle signal B in front of the robot;
[0091] Step 2: The de-icing robot observes the position of the cable in front of it through the camera set on the chassis, and sets the cable 30cm in front of the forearm of the robot as the expected position at the current moment of the end of the robot arm (x g ,y g ); According to the difference between the current position and the expected position of the end of the robot arm (e x ,e y ) and the obstacle signal B in the current situation, use the fuzzy pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com