Construction Method of Axial Hybrid Magnetic Bearing Ant Colony Algorithm Fractional Order PID Controller
An axial mixing and ant colony algorithm technology, applied in the control field, can solve the problems of the influence of the accuracy and real-time performance of the control system, it is difficult to achieve a better control effect, and the complexity of the control system is increased, so as to ensure system stability, Good global optimization performance, flexible design effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
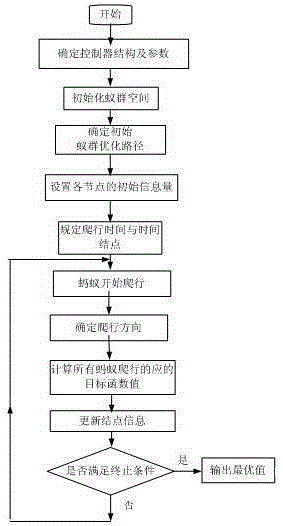
[0027] The present invention is specifically implemented according to the following concrete steps:
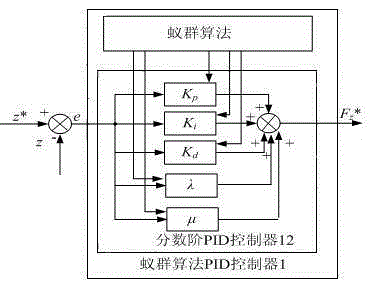
[0028] 1. See figure 1 and figure 2 , the structure and input and output parameters of the axial hybrid magnetic bearing fractional order PID controller 12 must be determined first. The axial displacement signal of the axial hybrid magnetic bearing z with a given axial displacement reference position signal z *Compared to get the displacement deviation signal e , the displacement deviation signal e Input to a conventional fractional-order PID controller, the control law adopted by the fractional-order PID controller is The fractional order PID controller 12, K p is the proportional coefficient; K i is the integral coefficient; K d is the differential coefficient; λ is Differential order coefficient; mu is the integral order coefficient; e ( t )for t time displacement deviation; D is a calculus operator, where, , for t The control amount of the force ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com