Synchronous tracking and controlling method for motor train unit based on distributed model
A technology of synchronous tracking and control methods, applied in adaptive control, general control systems, control/regulation systems, etc., can solve problems such as ignoring system dynamic performance, complex multi-variable, nonlinear dynamic systems, difficult online adjustment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
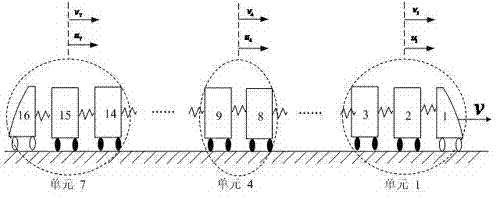
[0094] The implementation of the present invention selects fourteen-action two-trailers (the first and sixteenth sections are trailers, and the rest are EMUs) CHR380AL EMU as the research object. The distribution diagram is as follows image 3 Shown. Collect this type of EMU and run in Xuzhou East The actual data of Jinan section, combined with high-speed EMU traction / braking characteristic curve, carried out distributed modeling and operation control simulation verification. The subspace model identification method is used to identify 1600 sets of input and output data samples of each power unit, and a distributed state space prediction model for high-speed EMUs is obtained. The state matrix and initial state of each power unit are as follows:
[0095] The model of unit 1:
[0096] A 1 =[0.99886], B 1 =[4.2142e-005 -4.1864e-005]
[0097] C 1 =[6730.3], D 1 =[0 0], K 1 =[0.00015309], x 1 (0)=[9.0846e-010]
[0098] Model of Unit 2:
[0099] A 2 =[0.99862], B 2 =[-4.5886e-005 2.1897e-0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com