Point cloud automatic registration method based on normal vector
An automatic registration and normal vector technology, which is applied in image data processing, instruments, calculations, etc., can solve the problems of unfavorable depth map data fusion and difficulty in obtaining accurate fit in overlapping areas of depth maps.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0085] The present invention will be further explained below in conjunction with the accompanying drawings.
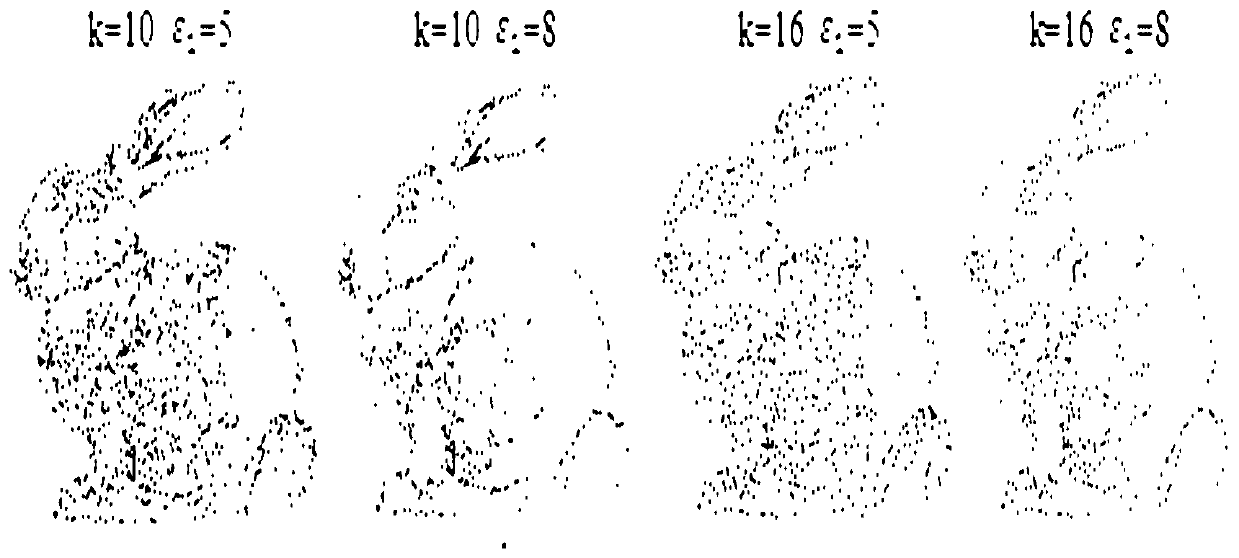
[0086] VC++6.0 is selected as the programming tool under the Windows operating system to perform registration processing on the multi-view point cloud data obtained by the 3D measuring equipment. This example uses the bunny point cloud data of Stanford University, and finally obtains a more accurate registration result.
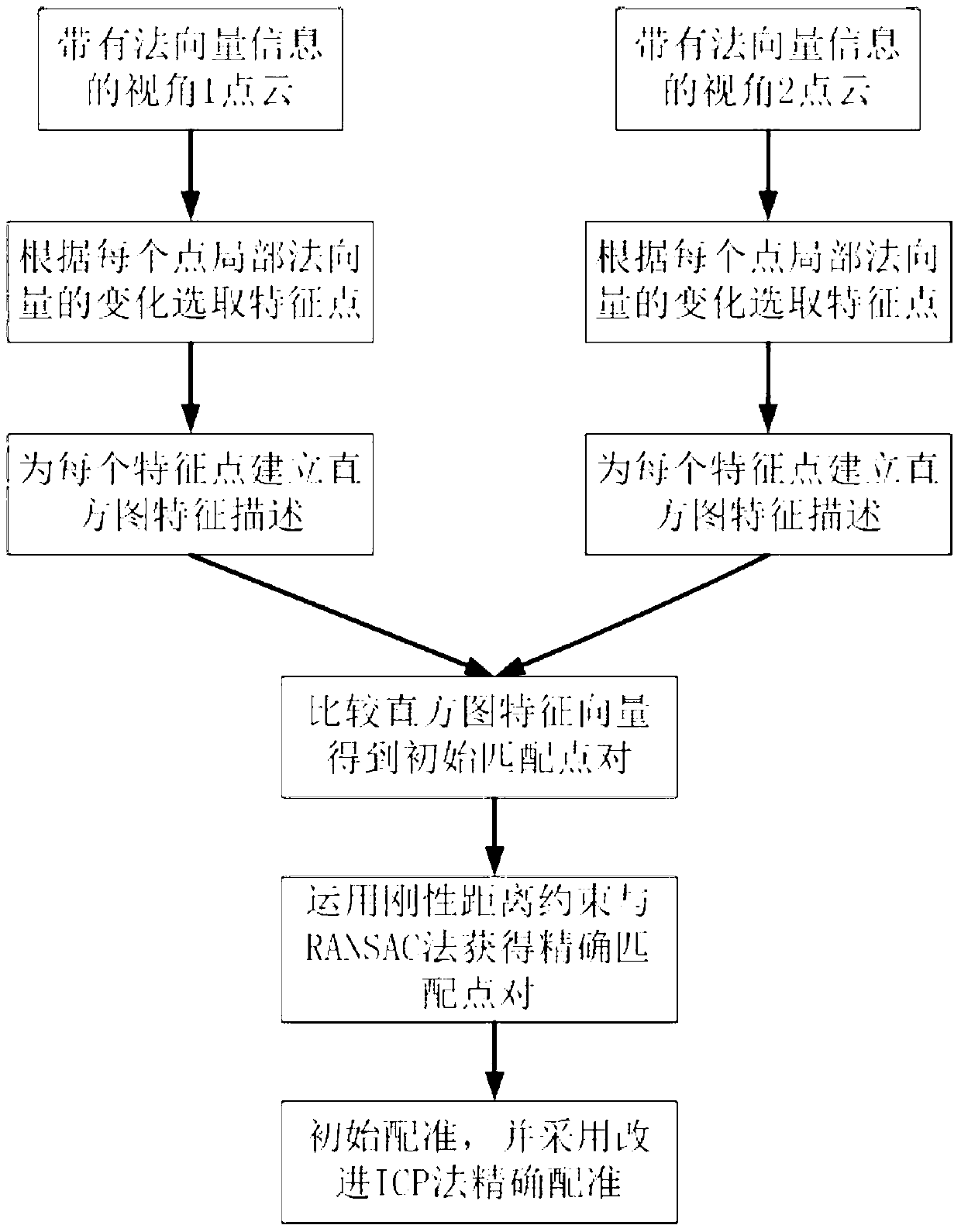
[0087] Such as figure 1 As shown, in the follow-up processing of 3D point clouds, point clouds from different perspectives need to be registered. In view of the problems of low feature recognition, sensitivity to noise, and high requirements for point cloud topology in existing feature-based automatic registration algorithms, The invention proposes a point cloud automatic registration algorithm based on normal vector information. First, select the feature point set for registration according to the change degree of the normal vector of the regional ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com