Image-processing-based unmanned plane accurate position landing method
A technology of image processing and unmanned aerial vehicles, applied in the direction of three-dimensional position/channel control, etc., can solve problems such as landing errors and insufficient GPS accuracy, and achieve the effect of improving the degree of intelligence and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
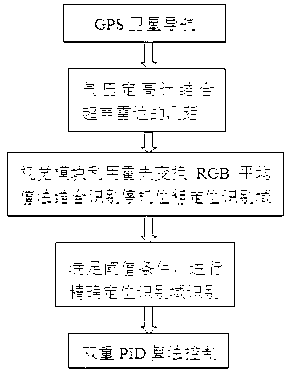
[0030] An image processing-based method for landing a UAV at a precise position according to the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0031] Step 1: The GPS satellite navigation system puts the UAV over the ground apron, and the GPS satellite positioning system navigates the UAV over the apron.
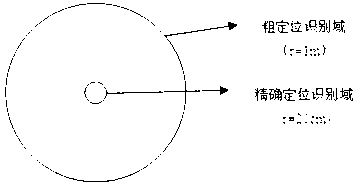
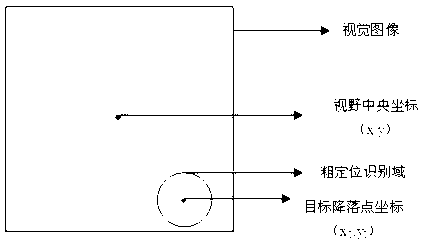
[0032] The above-ground apron, such as figure 2 As shown, the landing position of the marked UAV is marked by two concentric circles with radii of 20cm and 1m respectively. The inner circle is the precise positioning recognition domain, and the area between the outer circle and the inner circle is the rough positioning recognition domain, which are respectively marked in green and red. Filling, that is, the precise positioning identification domain is filled with green, the coarse positioning identification domain is filled with red, and the center of the concentric circle is the precise position of the landing p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com