Space teleoperation method dynamically assisted by speed type virtual force feedback
A virtual force and velocity technology, applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve the problems of specific graphics, limited auxiliary operation ability, and insufficient use of information.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will now be further described in conjunction with the embodiments and accompanying drawings:
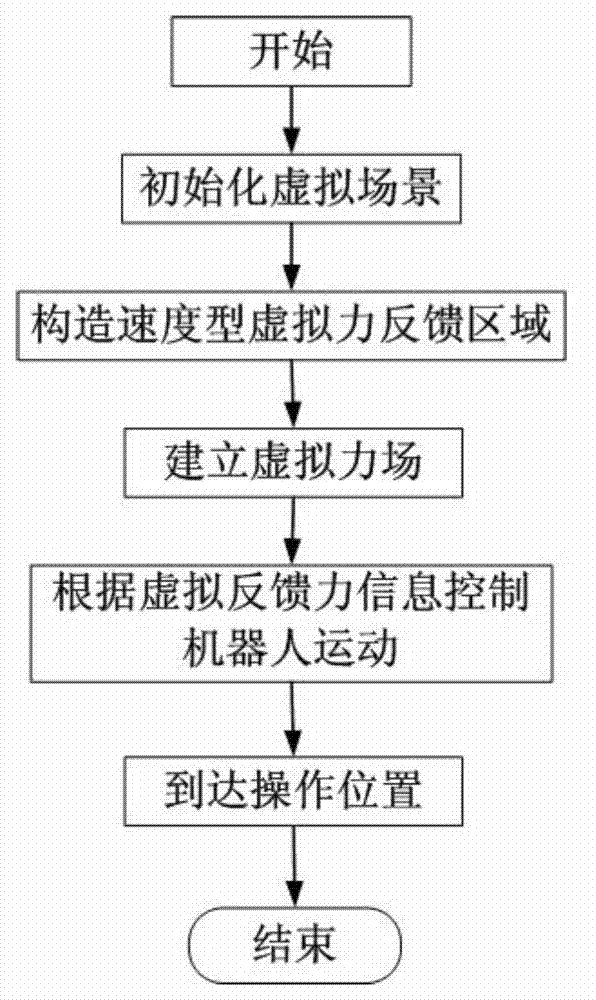
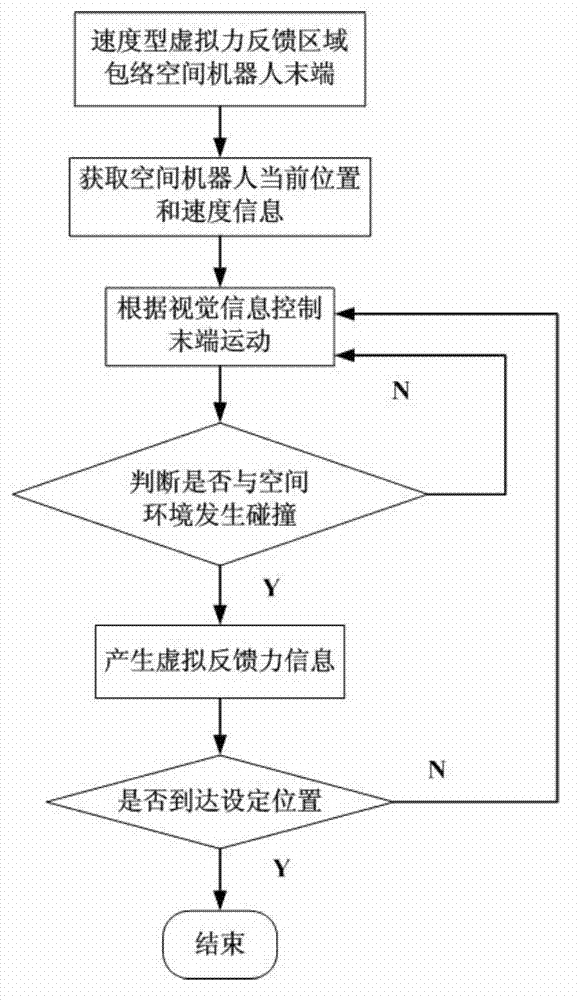
[0035] The implementation steps of the embodiment of the present invention are as follows:
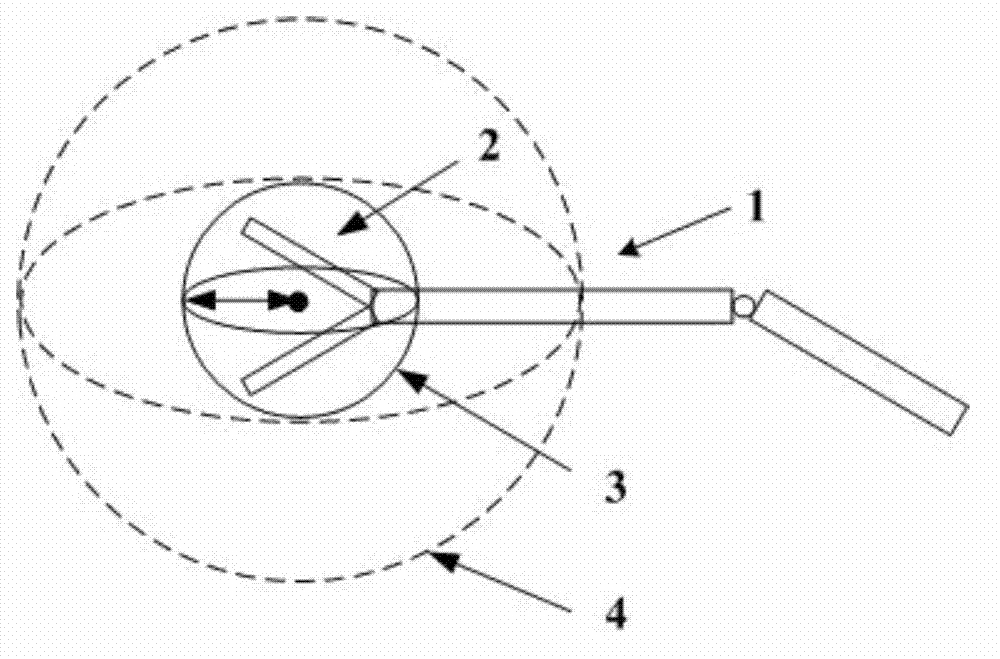
[0036] 1. Constructing a space robot and a space operating environment as a simulation environment: According to the D-H parameters shown in Table 1, a 6-DOF space robot graphic model is constructed based on C++ using the three-dimensional graphic interface software OSG; based on C++, using the three-dimensional graphic interface software OSG , construct a square with a side length of 1000mm as the satellite body and a pair of solar panels as the operating environment of the space robot.
[0037] Table 1 D-H parameters of the six-degree-of-freedom space robot
[0038] i α i-1 a i-1 d i-1 θ i 1 0 0 177 90 2 -90 0 0 90 3 0 985 0 0 4 90 0 0 90 5 -90 0 -765 0 6 90 0 0 0 7 0 0 382 0
[0039...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com