Multi-sensor information fusion method for mobile robot based on UKF (Unscented Kalman Filter)
A mobile robot and multi-sensor technology, applied in the direction of navigation calculation tools, etc., can solve the problem of high calculation accuracy of nonlinear distribution statistics, and achieve the effect of enhanced ability and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
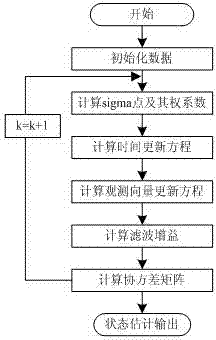
[0014] Below in conjunction with accompanying drawing and specific embodiment, the present invention will be further described, and present embodiment comprises the following steps:
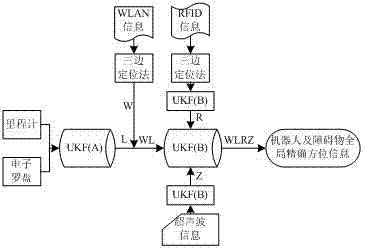
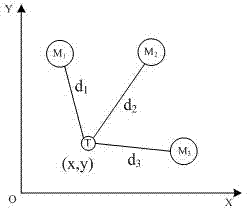
[0015] combine figure 1 In this embodiment, the odometer positioning information and the electronic compass orientation information are filtered in the UKF(A) filtering algorithm to obtain the initial local orientation information L of the robot, and the WLAN positioning information adopts the trilateral positioning method to obtain the preliminary global positioning coordinate W of the robot; W and L are left multiplied by the translation matrix to achieve coordinate translation to obtain the further global orientation information WL of the robot, and use the trilateral positioning method to obtain the positioning information from the RFID positioning information, and use the UKF (B) filtering algorithm to filter the data layer to obtain relatively more accurate The global positioning informatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com