Global localization guiding system and method based on multiple sensors
A multi-sensor and visual sensor technology, applied in the field of multi-sensor-based global positioning and guidance systems, can solve the problems of unguaranteed real-time performance, inability to obtain AGV position information in real time, and inability to obtain AGV global positioning information, etc., to achieve reduced guidance Effects of cost and high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: the present embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation is provided, but the protection scope of the present invention is not limited to the following embodiments.
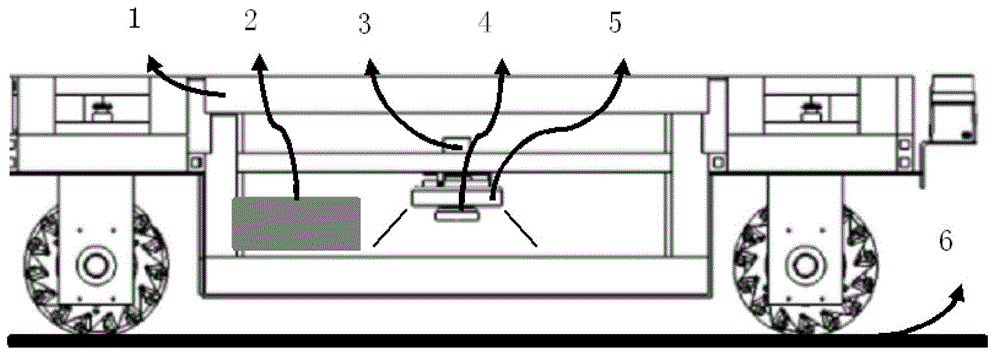
[0022] figure 1 It is a system block diagram of the present invention. In this embodiment, the global positioning and guidance system based on multi-sensors includes: AGV car body 1, embedded controller 2, acceleration sensor 3, visual sensor 4, light source 5, guidance Belt 6, wherein the embedded controller 2, acceleration sensor 3, visual sensor 4, and light source 5 are installed on the AGV body 1; the guide belt 6 includes black guide lines 62 and two-dimensional code icons 61, all of which are laid on the AGV On the ground to pass through the path.
[0023] The acceleration sensor 3 is used to obtain the acce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com