Tripod robot
A technology of robots and fuselage, applied in the field of mechanical control, to achieve the effect of practical promotion value and stable operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
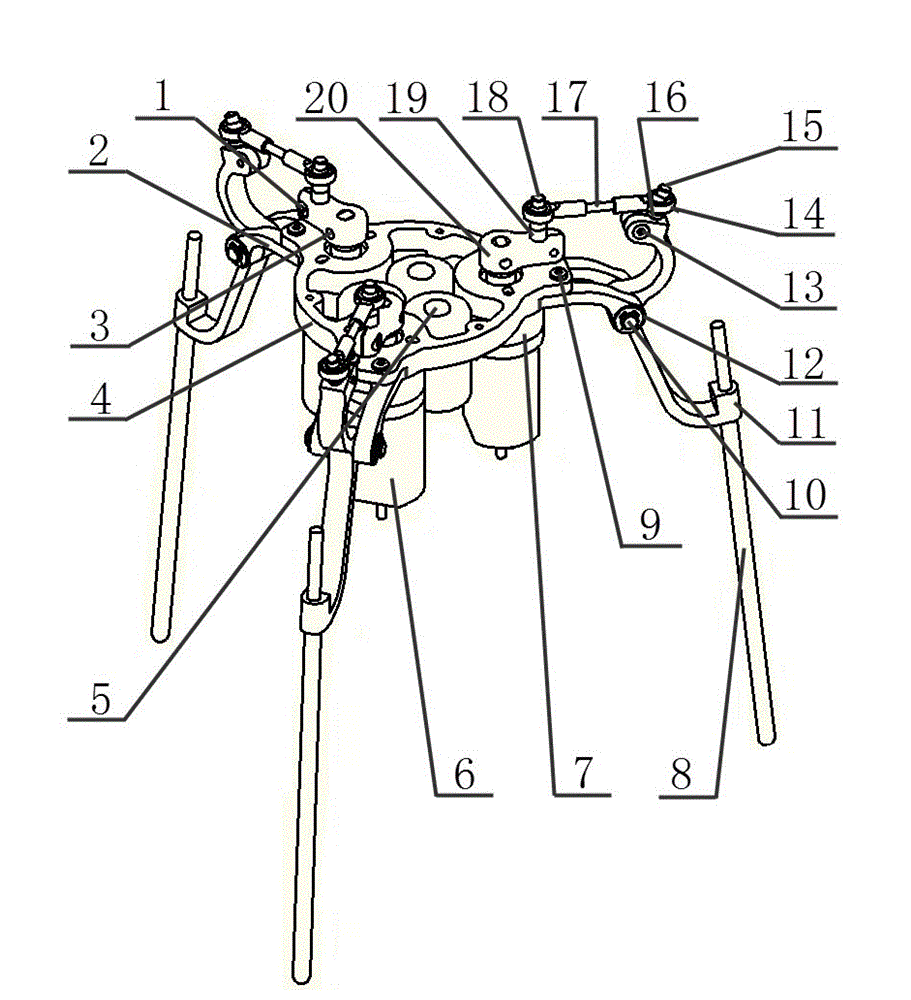
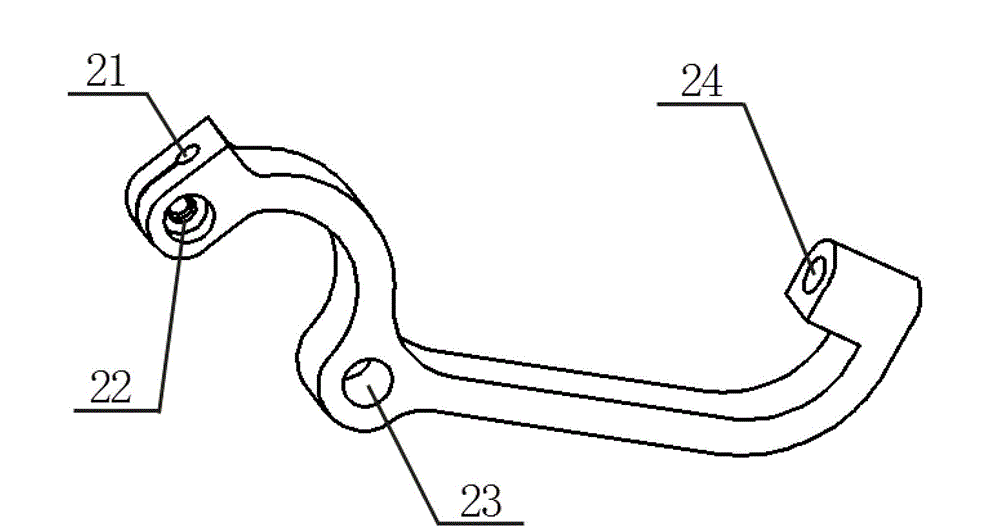
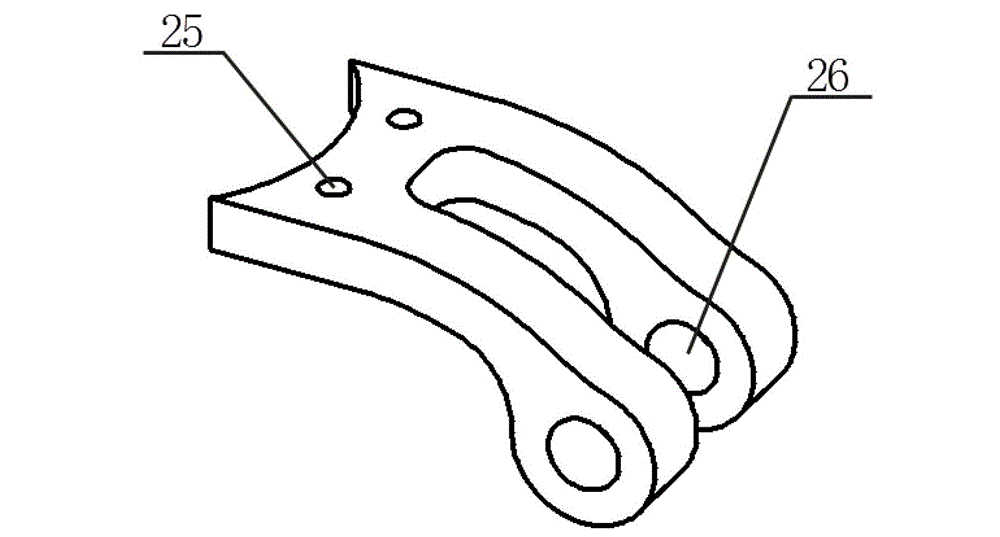
[0021] combine Figure 1-Figure 4 The present invention is described further:
[0022] Three-legged robot, including crank pin set screw 1, rocker bracket 2, crank positioning screw 3, body 4, power supply and control circuit 5, encoder 6, coreless motor 7, legs 8, rocker bracket fixed Screw 9, rocker shaft 10, rocker 11, circlip 12, rocker pin set screw 13, aluminum alloy ball joint 14, rocker pin 15, small sleeve 16, aluminum alloy ball joint connecting rod 17, crank pin 18. Large sleeve 19, crank 20, rocker pin fixing hole 21, rocker pin set screw hole 22, rocker shaft hole 23, leg fixing hole 24, rocker bracket fixing hole 25, rocker shaft fixing hole 26 , crank positioning top wire hole 27, coreless motor shaft fixing hole 28, crank pin fixing hole 29, crank pin set screw hole 30. Each leg of the robot moves independently. The encoder, the coreless motor, the power supply and the control circuit together drive the robot's leg movement and control the robot's movement. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com