Rehabilitation training robot for lower limbs
A technology of rehabilitation training and robotics, applied in the direction of coordination training equipment, cardiovascular system adjustment training equipment, gymnastics equipment, etc., can solve the problems of exposure, high strength, single form and function, etc., to improve control ability , easy-to-accept, simple-looking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention provides a lower limb rehabilitation training robot. The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
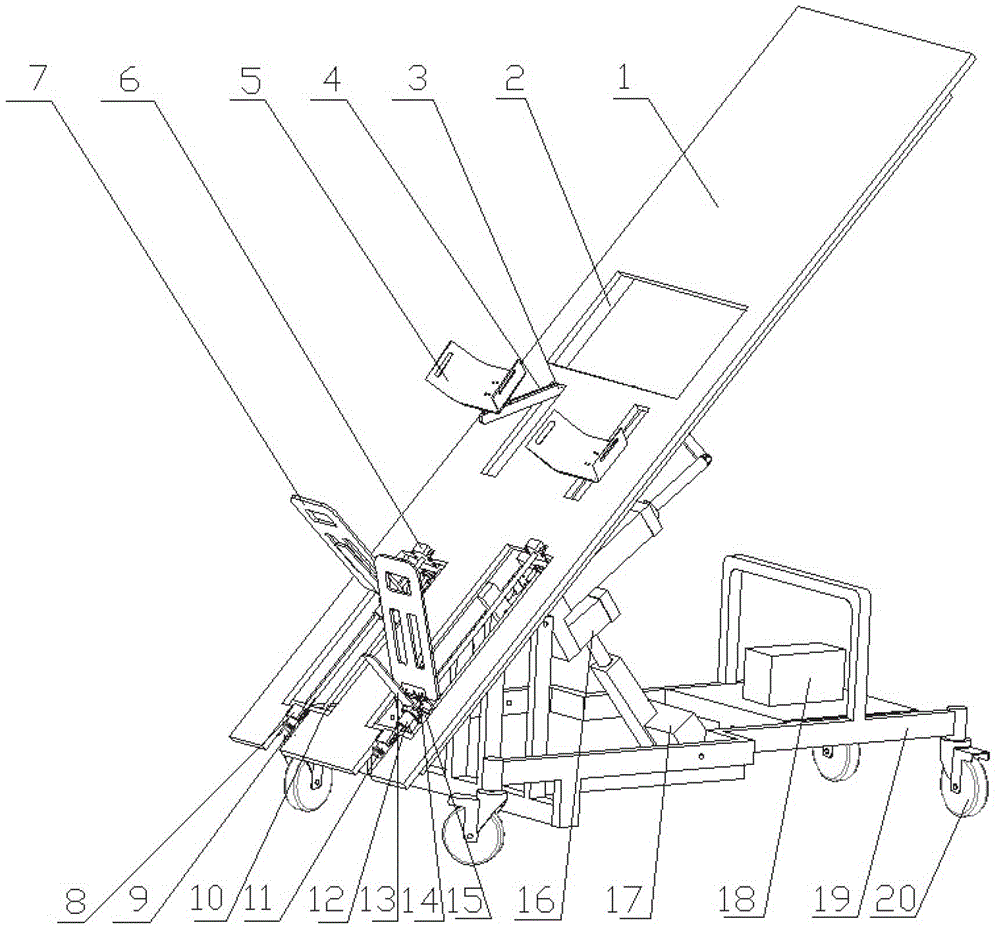
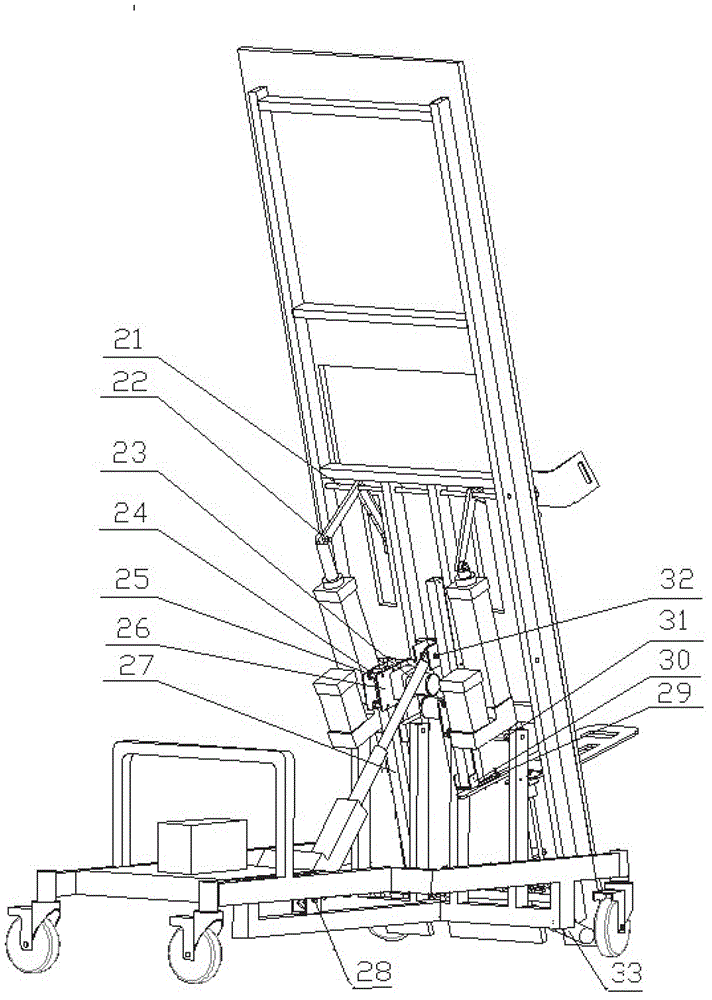
[0023] The structure of the present invention is as figure 1 with figure 2 As shown, it is mainly divided into four parts: support mechanism, tilting system, lower limb training mechanism and control system.
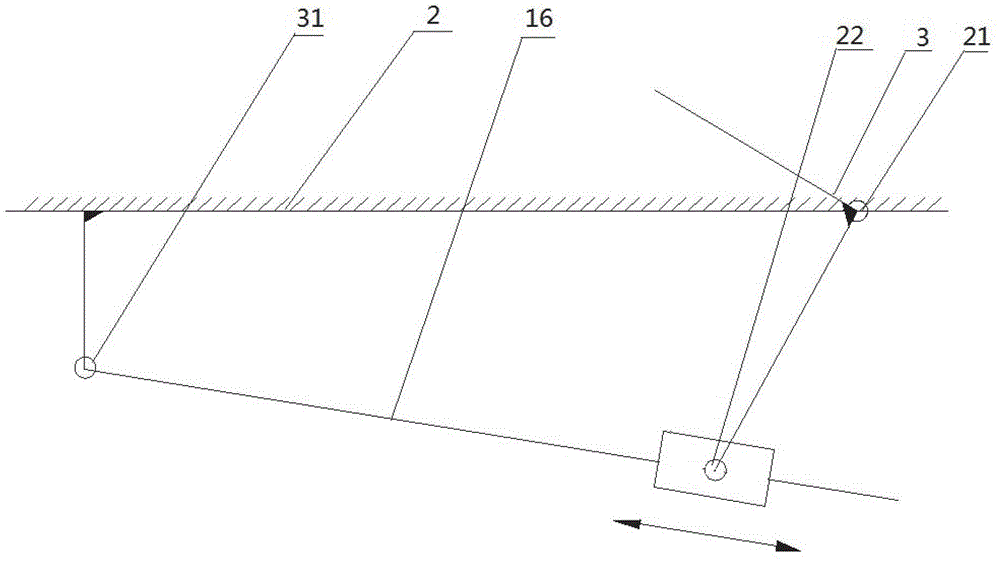
[0024] The supporting mechanism and the tilting system: including a fixed bed base 19, a lower limb rehabilitation device installation platform bed board frame 2, a bed board 1 that fixes the patient and carries part of the patient's body weight, a tilting power source electric push rod 17, and a control box 18; The bed base 19 and the bed frame 2 are hinged through the bearing steel 31; the tail of the electric push rod 17 is hinged on the bed base 19 through the pin shaft 28, and the head is hinged on the bed frame 2 through the pin shaft 32 to push the bed fra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com