


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Symmetrical centrifugal force power single-leg jumping machine
A technology of centrifugal force and power, applied in the field of robotics, can solve the problems of increasing the difficulty of control and adjustment, difficulty in simultaneous realization, mechanical structure impact, etc., and achieve the effect of simple structure, reducing the difficulty of control, increasing stability and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
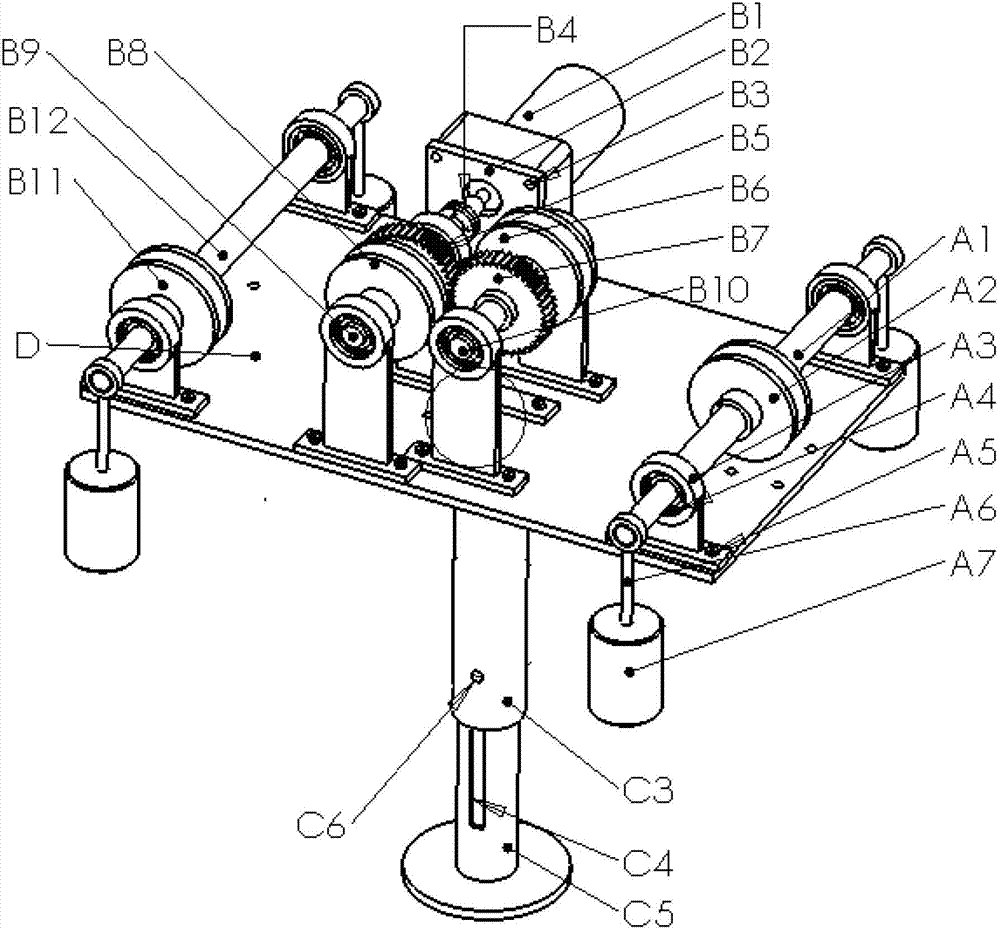
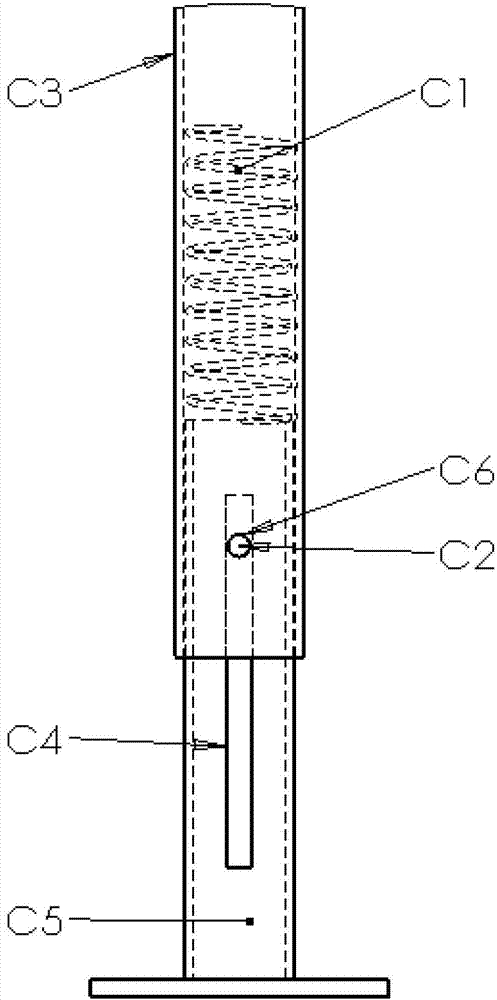
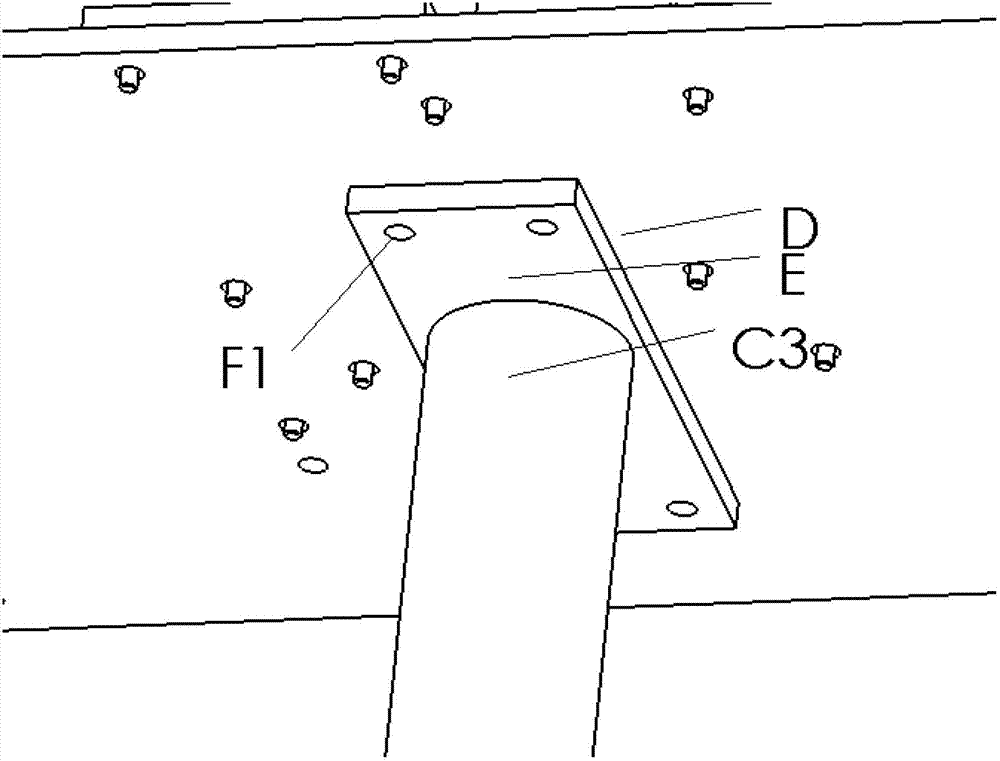
[0023] A single-leg jumping robot powered by symmetrical centrifugal force, including an upper motor module providing power, four mass blocks A7 main body, a support plate D and a spring leg sleeve for storing energy at the lower part, the motor module includes: motor B1, motor board B2 , coupling B4, first shaft B9, second shaft B10, third shaft B12, fourth shaft A1, first pulley B8, second pulley B11, third pulley B6, fourth pulley A2, The first gear B5, the second gear B7, eight bearings A4, eight bearing seats A3, and bolts A5, the motor B1 is fixed on the motor plate B2 by bolts, and the motor plate B2 is fixed on the support plate D. The second belt The wheel B11 is fixed to the third shaft B12 through a key connection, the fourth pulley A2 is fixed to the fourth shaft A1 through a key connection, and the third shaft B12 and the fourth shaft A1 are respectively tightly fastened with the mass block A7 and the connecting rod A6. The first axis B9 and the second axis B10 re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com