Route planning method based on multi-target glowworm swarm algorithm
A firefly algorithm and path planning technology, applied in the field of path planning, can solve problems such as not considering the performance index of path planning problems, being unable to compare optimal paths, and not conforming to the essence of multi-objective optimization problems, so as to meet actual needs and be flexible sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention will be described in detail below in conjunction with the accompanying drawings.
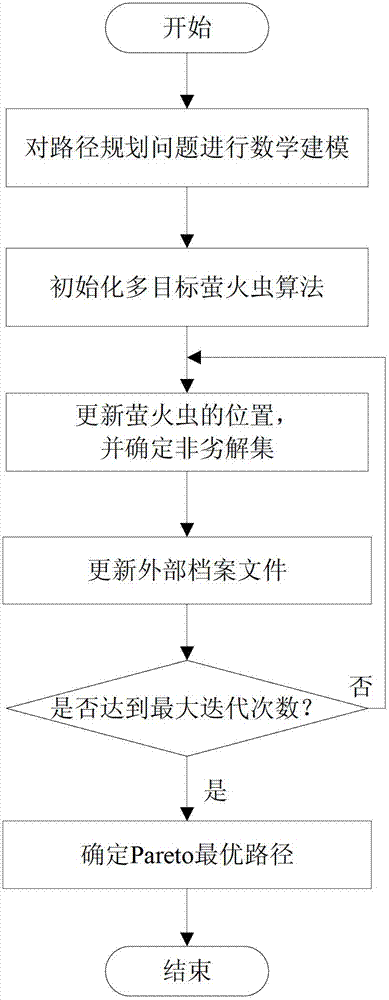
[0069] A kind of path planning method based on the multi-objective firefly algorithm proposed by the present invention, such as figure 1 As shown, it specifically includes the following steps:
[0070] Step 1: Mathematically model the path planning problem.
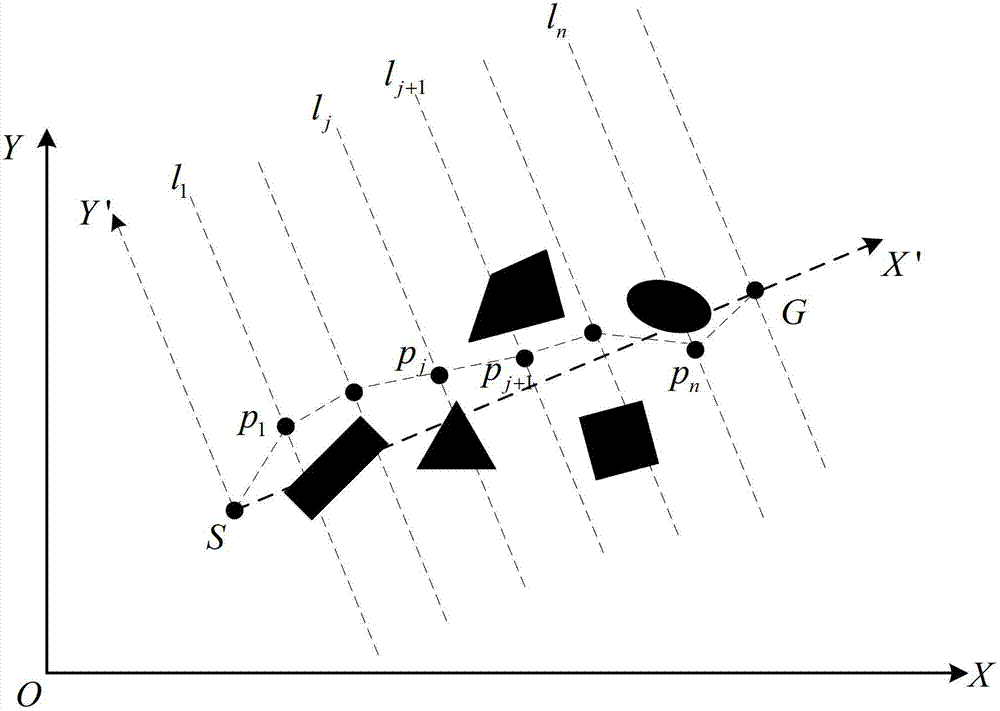
[0071] (1) Mathematical modeling of the environment for path planning.
[0072] Such as figure 2 As shown, path planning is carried out in a two-dimensional plane, S is the starting point of the robot, and G is the end point. A global coordinate system O-XY is established within the scope of path planning, and objects filled with black solids represent obstacles. The path planning of the robot is to find a set of path points. Assuming that n path points form a path, the path can be expressed as P={S,p 1 ,p 2 ,...,p n ,G}, where (p 1 ,p 2 ,...,p n ) is the sequence of waypoints in the global map, that ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com