Medical mechanical arm tail end device
A terminal device and robotic arm technology, which is applied in the field of medical robotic arm terminal devices, can solve the problems of patients' surgical injuries, difficulty in obtaining coordinate positioning in image space and patient space, and lack of doctor's sense of presence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0037] As an end effector of a medical robot arm, the present invention needs to be attached to a robot arm for automatic positioning and attitude determination.
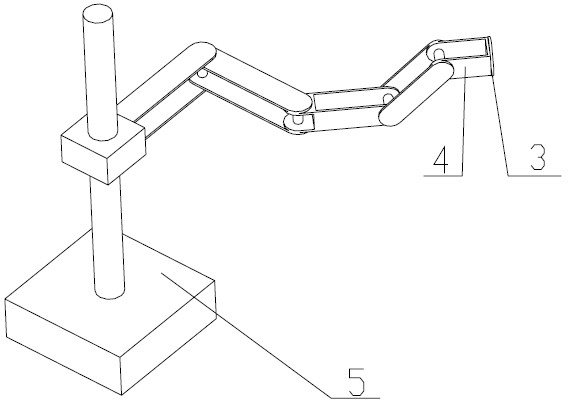
[0038] Such as figure 1 As shown, the mechanical arm 5 can enable the loading and unloading guide mechanism 1 in the present invention to realize the orientation of the desired position / posture, which requires a certain number of degrees of freedom. Since the degree of freedom of needle rotation around the axis is not required, only 5 degrees of freedom are needed to complete the basic task, of which 3 degrees of freedom are used for spatial positioning, and the other 2 are used for attitude adjustment. However, in actual situations, redundant 5 degrees of freedom are redundantly controlled to avoid abnormal situations such as interference, joint limits, and singular points.
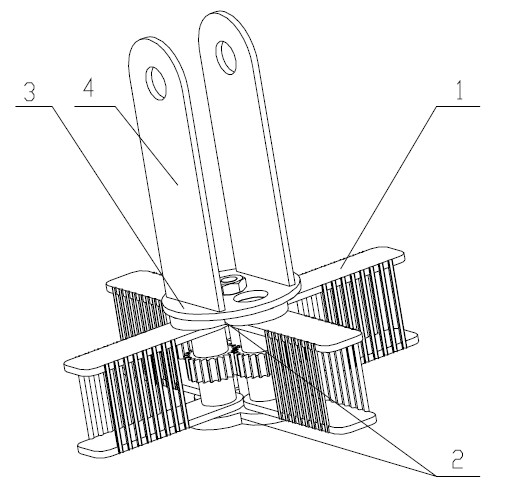
[0039] Such as figure 2 As shown, the terminal device of the medical mechanical arm includes a loading and unloading guide mechanism 1 (h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com