Micro actuator with adjustable local magnetic field
A driver and magnetic field technology, applied in the direction of holding devices and electrical components using magnetic attraction or thrust, can solve the problems of electromagnetic force fluctuation edge effects and accumulated errors, complex two-stage driving methods, and limitations of degrees of freedom, etc., to eliminate Electromagnetic force fluctuation, flexible and convenient adjustment, and the effect of reducing the impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and implementation methods in which the permanent magnet array is used as an example of a micro-actuator structure with five poles.
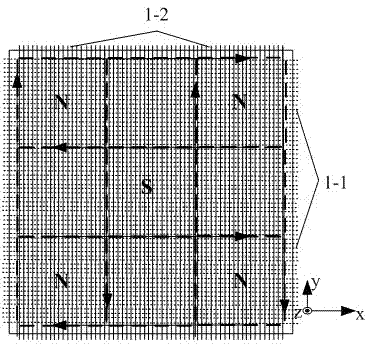
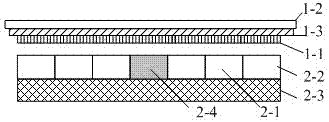
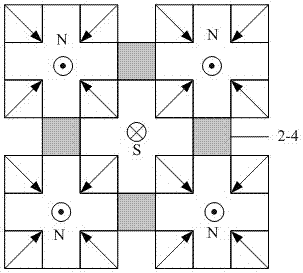
[0024] Such as figure 1 and figure 2 As shown, the present invention includes a stator composed of a two-dimensional permanent magnet array and a back iron, and a mover with armatures staggered along the X and Y axis directions or an electric armature staggered along the Y and X axes on the upper and lower surfaces of the insulator. The mover of the pivot has an air gap between the stator and the mover, which can realize the precise driving of six degrees of freedom through the action of Lorentz force; the two-dimensional permanent magnet array forms a rectangle as a whole, and the "ten"-shaped N and S main magnetic poles 2-1 is in a staggered distribution, and the adjacent N main magnetic poles or adjacent S main magnetic poles are separ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com