Exoskeletal thumb moving function rehabilitation robot
A technology for rehabilitation robots and sports functions, which is applied in the direction of sports accessories, passive exercise equipment, gymnastics equipment, etc., and can solve the problems of difficult disassembly and assembly of mechanisms, looseness, and too many parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0051] The invention will be further described in detail below in conjunction with the accompanying drawings.
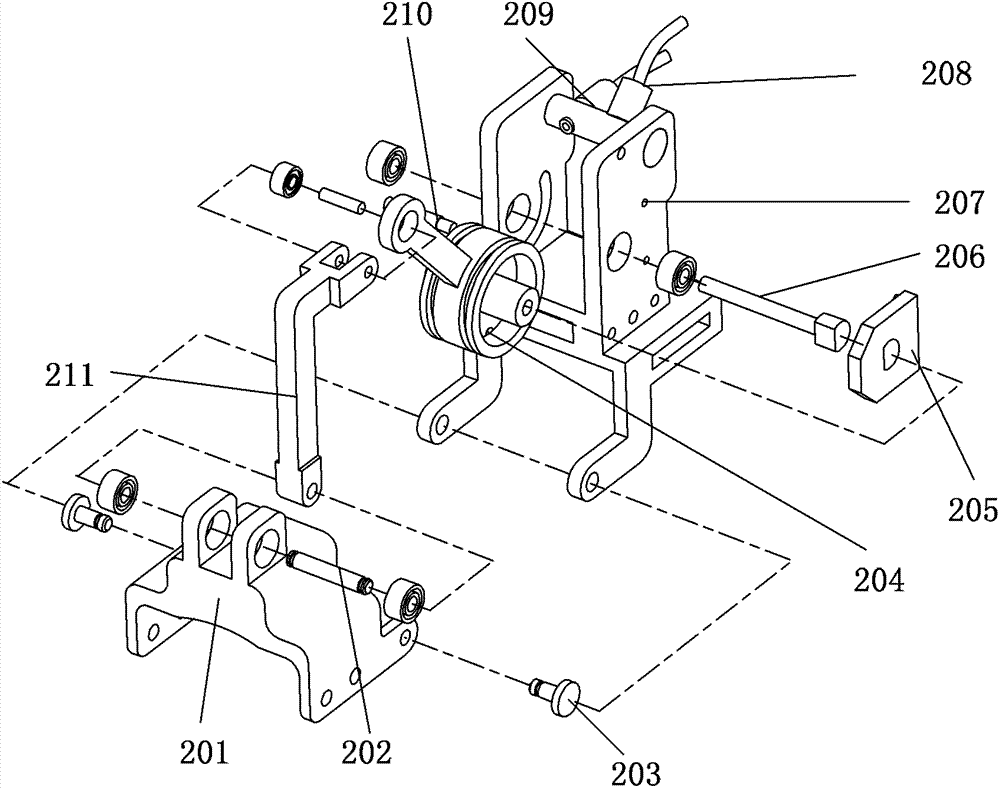
[0052] The invention is an exoskeleton thumb motor function rehabilitation robot, which performs motor function rehabilitation training for the thumb. figure 1 Shown is the system diagram of the device, which can be divided into executive part 1, interphalangeal metacarpophalangeal joint drive 5 and wrist metacarpophalangeal joint drive 6. Interphalangeal metacarpophalangeal joint drive 5 and wrist metacarpophalangeal joint drive 6 are independent of each other, and the individual two-way drive to the executive part 1 is realized through the steel wire rope 7 (8 pieces), so as to realize the rehabilitation actions of bending and straightening, abduction and adduction of the patient's fingers . In order to prevent the wire rope 7 between the executive part 1 and the distal and proximal joint drive 5 and the metacarpal joint drive 6 from being loose, they are connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com