Suspension control method for low and middle speed magnetic-levitation train
A technology for levitation control and maglev trains, which is applied to electric vehicles, vehicle components, magnetic attraction or thrust holding devices, etc. It can solve problems such as suspension instability and achieve the effect of improving control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The specific embodiments of the present invention will be described below in conjunction with the accompanying drawings.
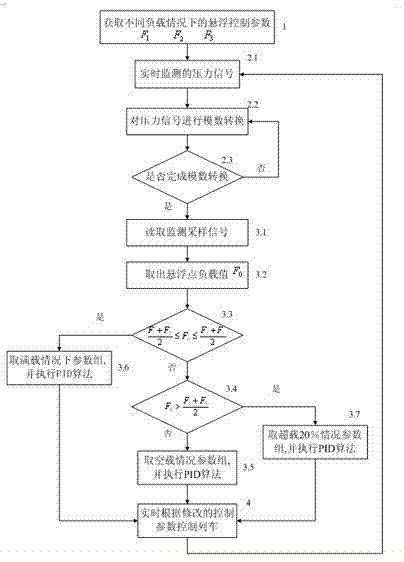
[0038] The present invention describes a suspension control method for medium and low-speed maglev trains. In order to solve the problem that the PID control method in the prior art can only ensure the optimal suspension control performance under a certain system parameter condition, and the suspension performance will become worse when the system parameter changes A method that can adjust the main levitation control parameters as the parameters of the maglev system change is proposed. During the actual operation of the train, the biggest change of the system parameters is the change of the load. The present invention changes the suspension control parameters according to the change of the load of the suspension control point of the maglev train, improves the adaptability of the suspension controller to the load change, and has strong practicality. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com