Micro gyroscope adaptive control method based on model reference
A technology of adaptive control and micro gyroscope, applied in the field of control system, can solve the problems of the characteristics and design differences of the original components, the bad influence of environmental changes, and the inability to solve the problems of zero angular rate output, etc., to achieve the effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The method for self-adaptive control of a micro-gyroscope based on model reference proposed by the present invention will be described in detail below with reference to the accompanying drawings and embodiments.
[0028] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 As shown, the method for adaptively controlling a micro-gyroscope based on a model reference in a preferred embodiment of the present invention includes the following steps,
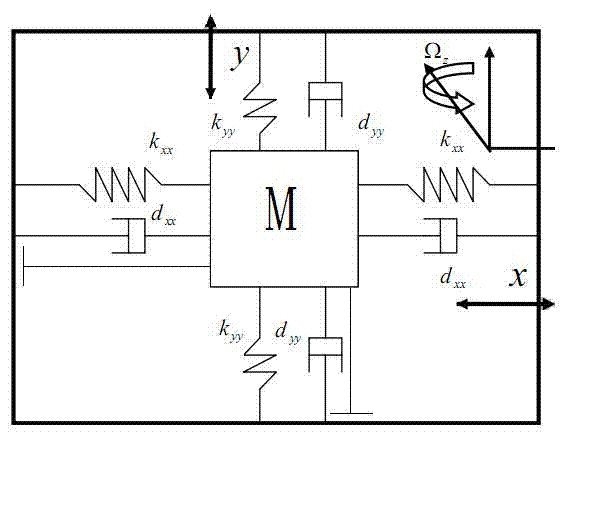
[0029] (1) Establish an ideal kinetic model
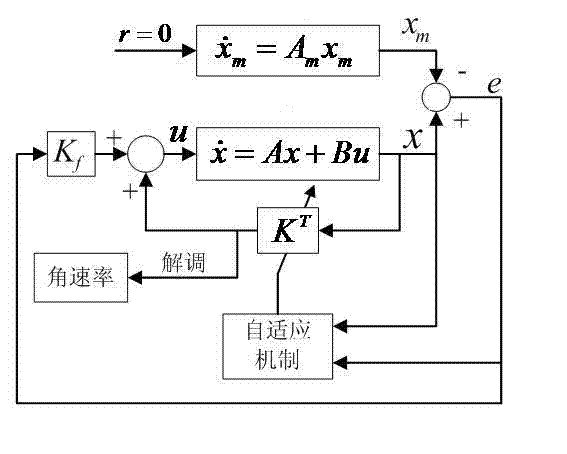
[0030] The design reference model is two sine waves of different frequencies with amplitude x m =A 1 sin(w 1 t), y m =A 2 sin(w 2 t), where w 1 ≠w 2 and are not zero, written in state space as:
[0031] (2) Based on the Lyapunov method to control the micro gyroscope
[0032] Using the state vector X and tracking error e of the micro-gyroscope as the input signal of the feedback controller, the design control law is: u=K T x+K f e, where K T Controller pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com