In-vehicle camera apparatus enabling recognition of tail lamp of distant preceding vehicle
A technology for cameras and motor vehicles, which is applied in the directions of cameras, camera bodies, headlights, etc., and can solve the problems of blurred images, unclear signal/noise ratio, reduction, and inability to reliably identify taillights.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 2 example
[0050] will refer to Figure 5 and Figure 6 A second embodiment is described. Figure 5 A general configuration of the beam splitting filter 70 of the present embodiment, which is a modified form of the beam splitting filter 40 of the first embodiment, is shown. Figure 6 A general configuration of the vehicle-mounted camera device 7 of the present embodiment is shown. Since the second embodiment differs from the first embodiment only in the beam splitting filter 70 and the image sensor 10 , only the beam splitting filter 70 and the image sensor 10 will be described in detail below.
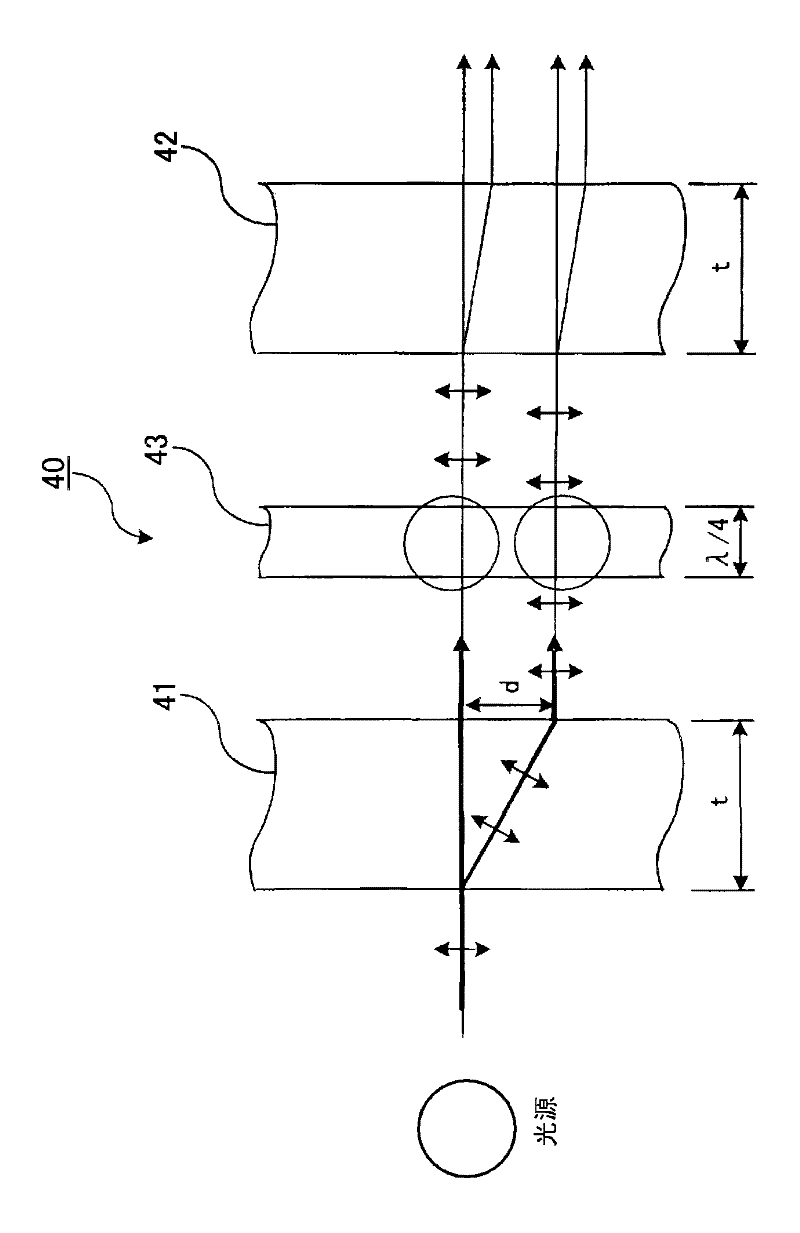
[0051] Such as Figure 5 As shown in , the difference between the beam splitting filter 70 of this embodiment and the beam splitting filter of the first embodiment is that the 1 / 4 wave plate 43 is removed. In addition, the image sensor 60 of the RGB Bayer array 18 of the second embodiment is relative to a horizontal plane parallel to the optical axis of the lens assembly 20 (that is, a plane...
no. 3 example
[0055] will first refer to Figure 7 An embodiment of the headlight control device 100 for performing automatic control of switching between high beam and low beam conditions of vehicle headlights will be described as an overall configuration in . Such as Figure 7As shown in , the headlight control device 100 includes an in-vehicle image processing device 1 and a headlight switching section 90 . The vehicle-mounted image processing device 1 is formed of the vehicle-mounted camera device 5 and the image processing section 80, however, the vehicle-mounted camera device 7 in the second embodiment may also be used instead. The image processing section 80 includes a microcomputer having a CPU, ROM, RAM, and an I / O section (not shown in the figure), which repeatedly executes processing routines according to programs stored in the ROM. The processing routine basically consists of four successive stages denoted (A), (B), (C) and (D) as follows:
[0056] (A) acquire an image from t...
no. 1 example
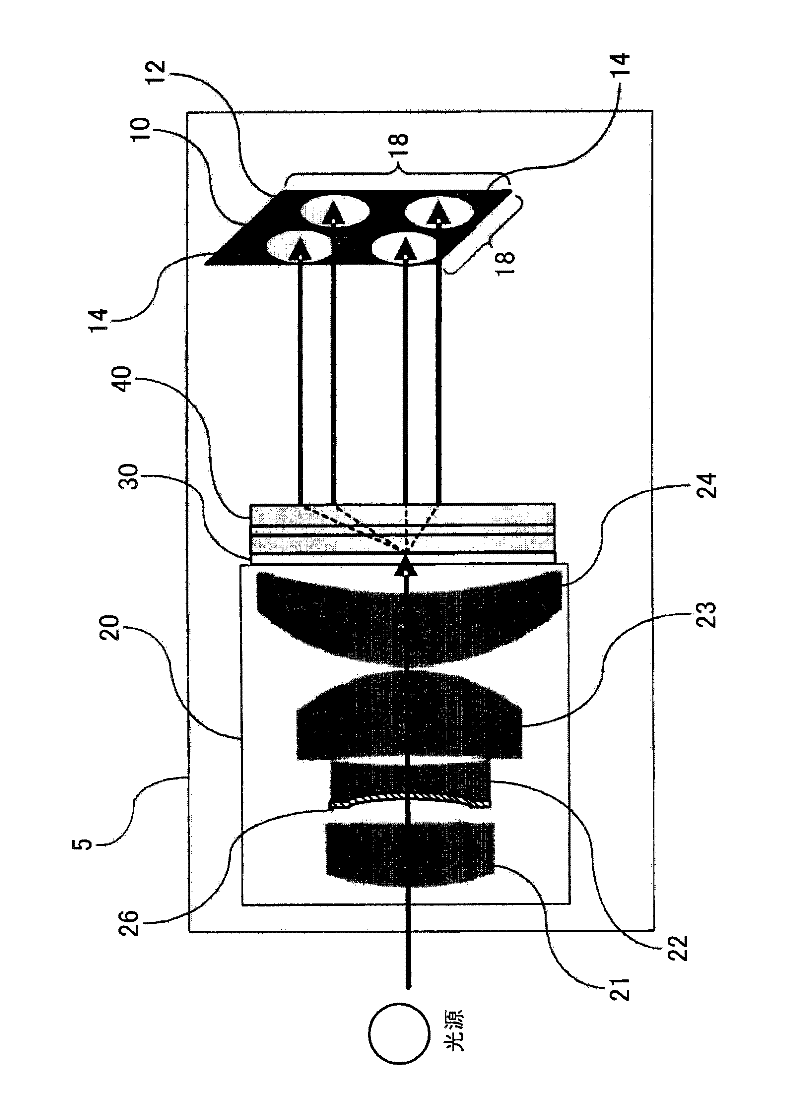
[0070] For the first embodiment, a 2×2 set of four light spots (for example, four light spots corresponding to light beams originating from distant taillights) is formed on corresponding adjacent RGB pixels of the RGB Bayer array 18 . For this embodiment, the plane of the RGB Bayer array 18 is at right angles to the horizontal (at right angles to the optical axis of the lens assembly 20). This condition is Figure 9 exemplified in part (a) of . However, it is also possible to displace the first polarizing beam splitter 41 or the second polarizing beam splitter 42 to a certain extent around the diagonal angle between two opposite corners, so that the four spots become diagonally shifted to Figure 9 The states shown in part (b) of , simultaneously fall on different respective adjacent pixels.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com