Nonlinear sensor compensation method based on free node recursion B-spline
A nonlinear compensation and sensor technology, applied in the field of sensors, can solve problems such as large amount of calculation, achieve the effect of small amount of calculation, improve accuracy, and reduce workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
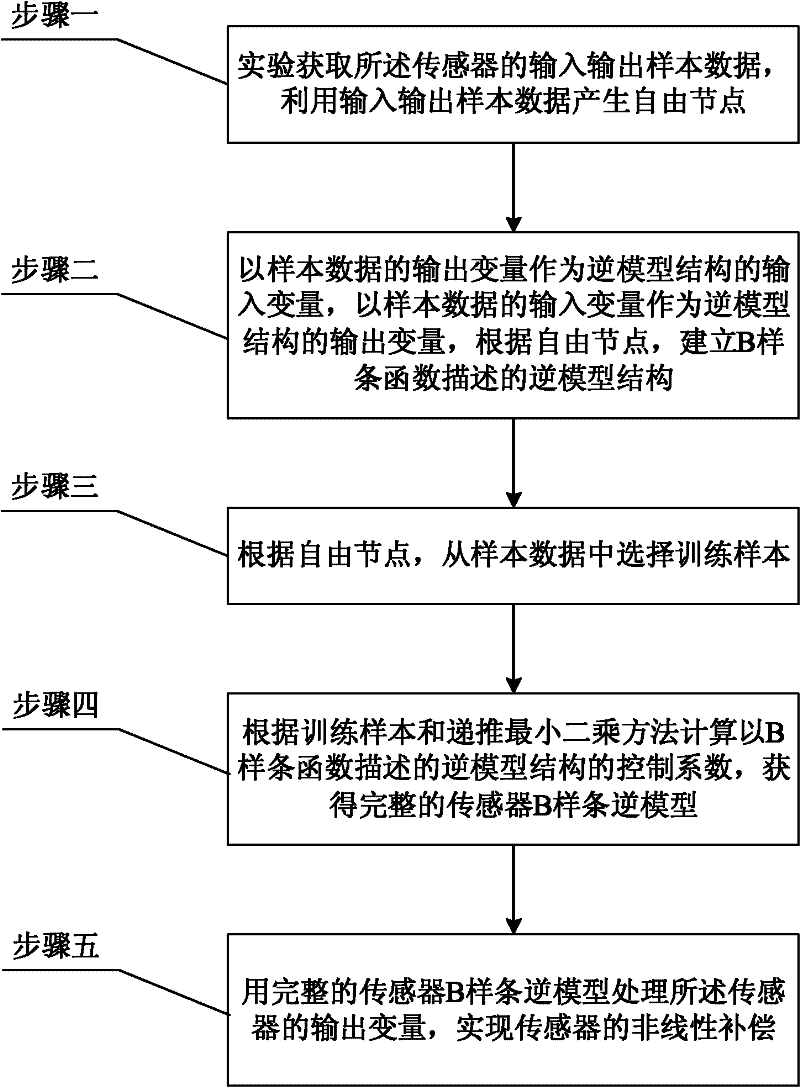
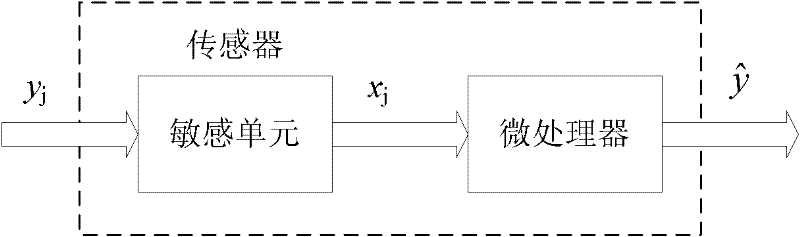
[0019] Specific implementation mode one: the following combination figure 1 and figure 2 Describe this implementation mode, this implementation mode comprises the following steps:
[0020] Step 1: Experimentally obtain the input and output sample data of the sensor, and use the input and output sample data to generate free nodes;
[0021] Step 2: using the output variable of the sample data as the input variable of the inverse model structure, taking the input variable of the sample data as the output variable of the inverse model structure, and establishing the inverse model structure described by the B-spline function according to the free nodes;
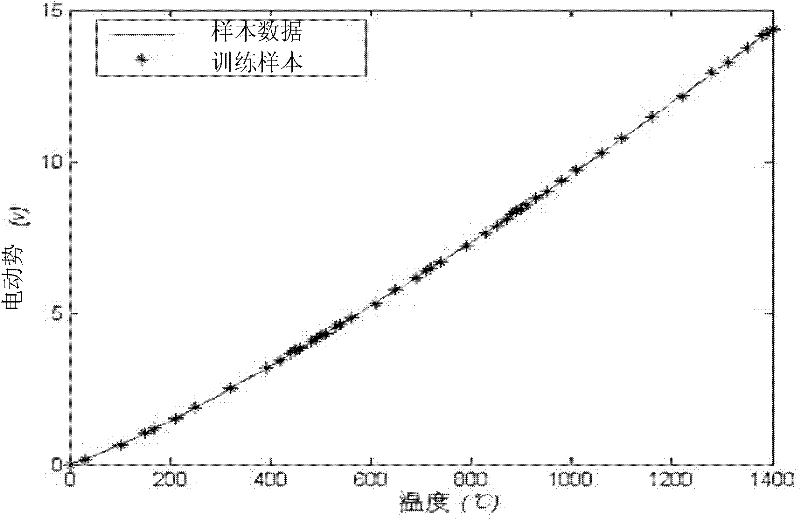
[0022] Step 3: Select training samples from sample data according to free nodes;
[0023] Step 4: Calculate the control coefficient of the inverse model structure described by the B-spline function according to the training samples and the recursive least squares method, and obtain a complete sensor B-spline inverse model;
[...
specific Embodiment approach 2
[0027] Embodiment 2: This embodiment is a further description of Embodiment 1. In this embodiment, the method of using input and output sample data to generate free nodes is:
[0028] Step 11: The expression of the node vector t is:
[0029] The initial node vector is t 0 :
[0030] t 0 = ( t - k + 1 0 , . . . , t - 1 0 , a = t 0 0 , t 1 0 = b , t 2 0 , . . . , ...
specific Embodiment approach 3
[0044]Specific embodiment three: this embodiment is a further description to embodiment two, and in step two, according to free nodes, the method for setting up the inverse model structure described by B-spline function is:
[0045] Establish B-spline basis functions according to the free nodes generated in step 1
[0046]
[0047] According to the B-spline basis function Obtain the inverse model structure described by the B-spline function as:
[0048] y j = Σ i = - k + 1 N c i B i , t k ( x j ) + e j = Σ i = - ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com