Robot structure
A technology of robots and deceleration mechanisms, applied in manipulators, manufacturing tools, joints, etc., can solve problems such as reduced bearing capacity, hidden safety hazards, and asymmetric forces
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0013] The robot structure of the present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
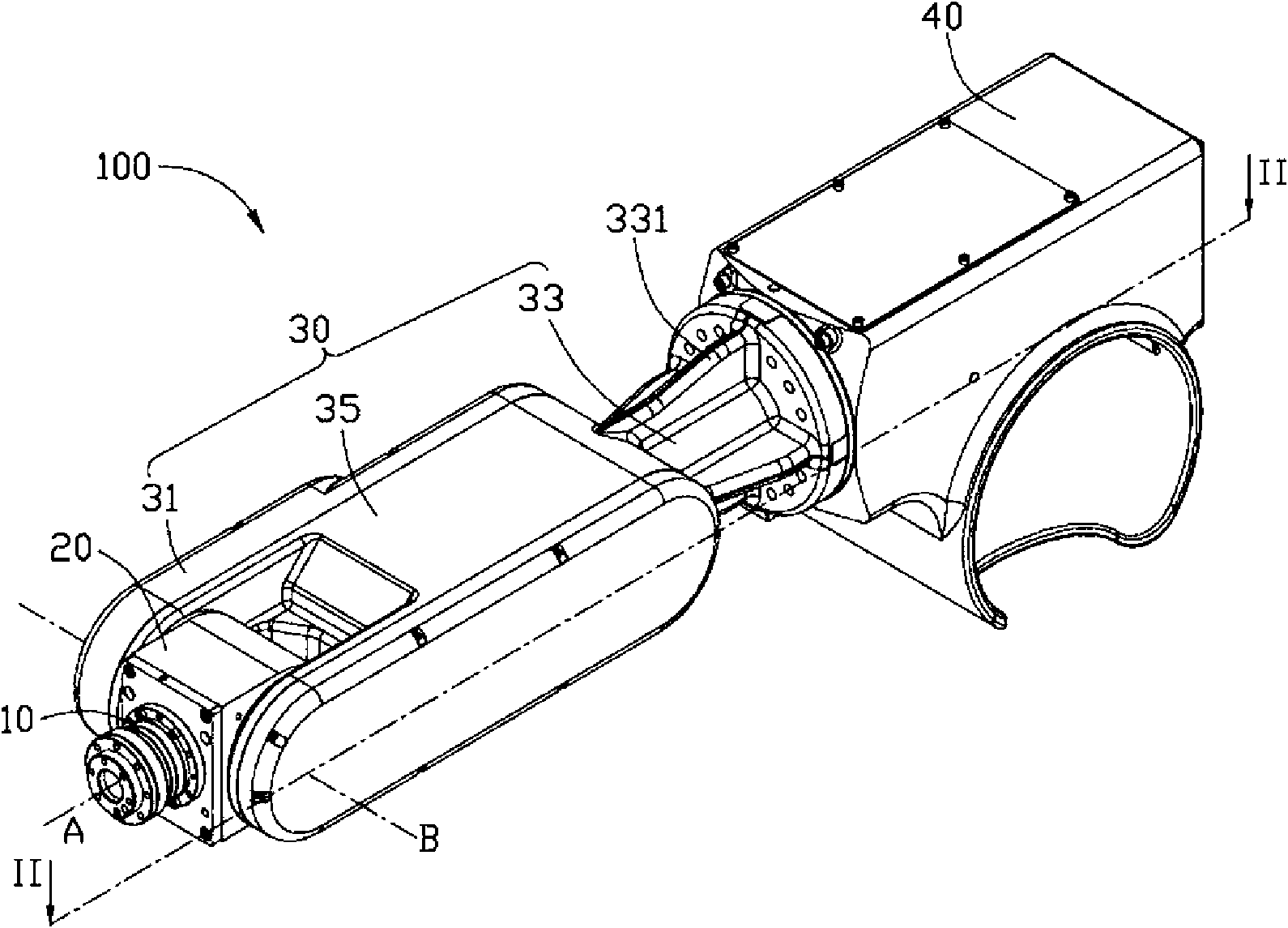
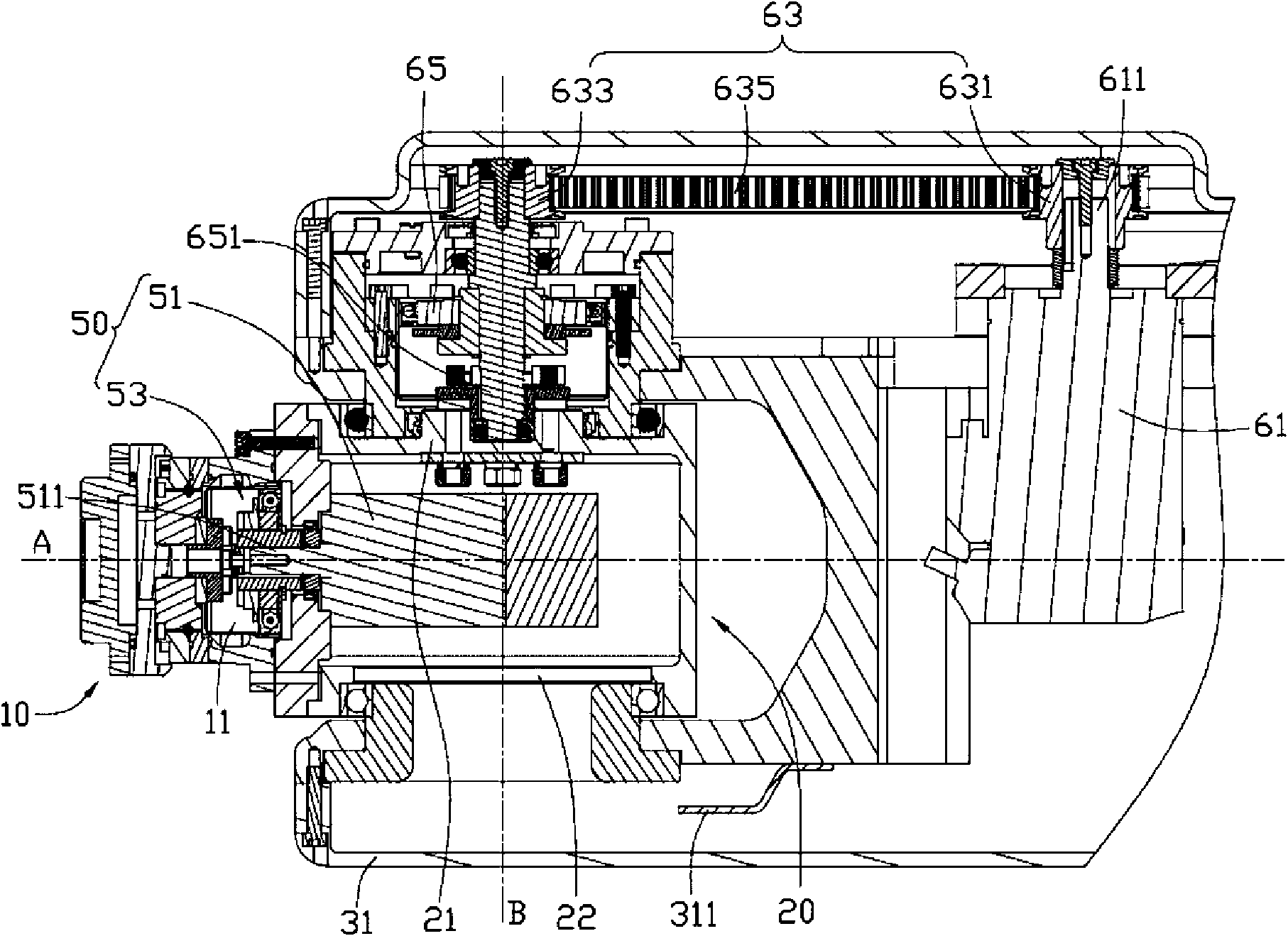
[0014] see figure 1 and figure 2 , the robot structure 100 includes a first shaft assembly 10 , a second shaft assembly 20 , a third shaft assembly 30 , and a fourth shaft assembly 40 that are pivotally connected to each other and relatively rotatable. The first wrist unit 50 at the junction, the second wrist unit 60 at the pivot joint between the second shaft assembly 20 and the third shaft assembly 30 , and the third wrist unit located at the pivot joint between the third shaft assembly 30 and the fourth shaft assembly 40 Unit 70.
[0015] Please also see image 3 , the first shaft assembly 10 is located at the extreme end of the robot structure 100, that is, it has a free end that is not connected with other parts, and the first shaft assembly 10 includes a plurality of matching elements, and one end of the first shaf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com