Method for connecting parallel connection walking robots and parallel connection walking robot thereof
A technology of walking robot and connection method, which is applied in the direction of manipulators, manufacturing tools, etc., and can solve problems such as adjusting the center of gravity left and right
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
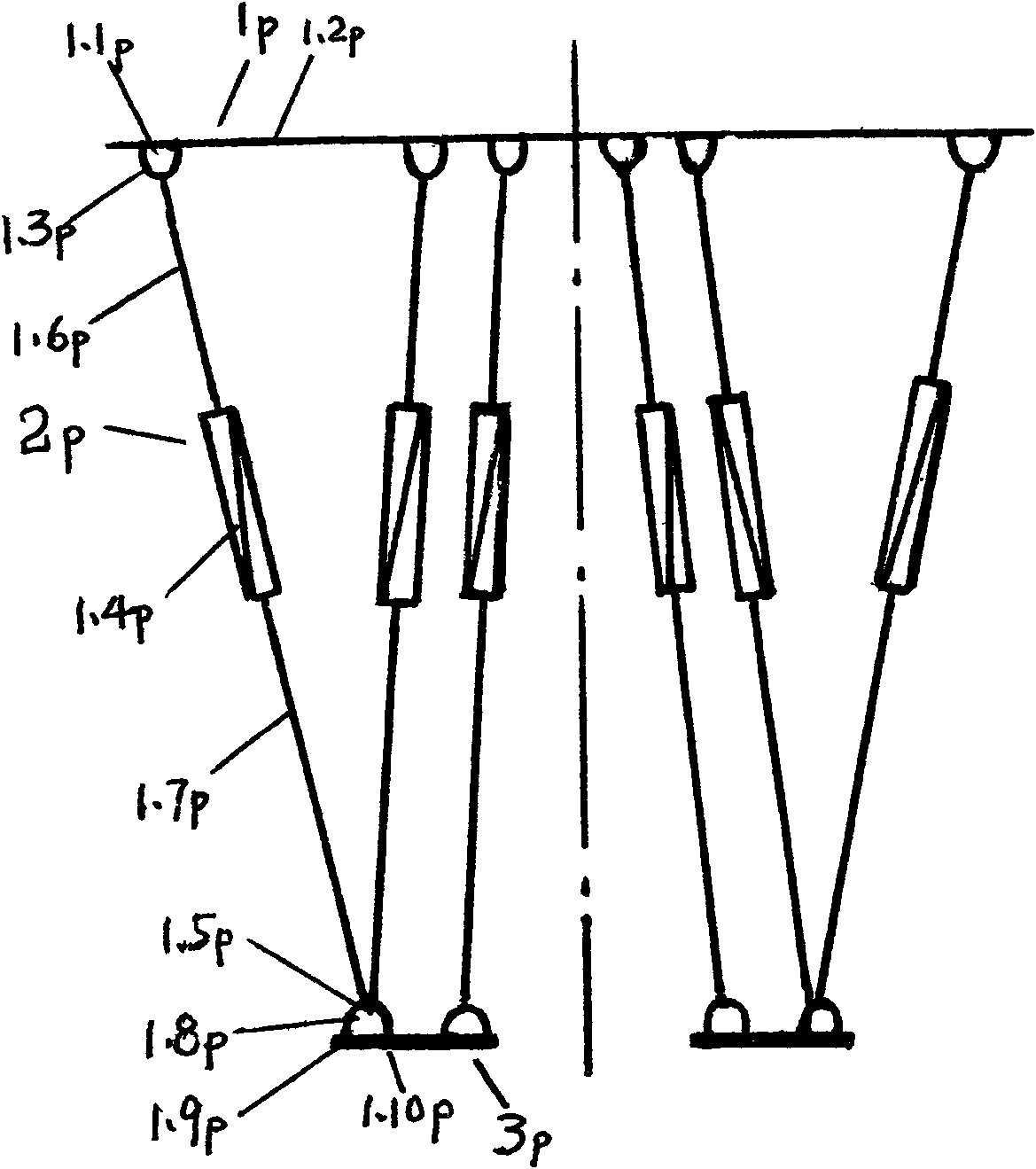
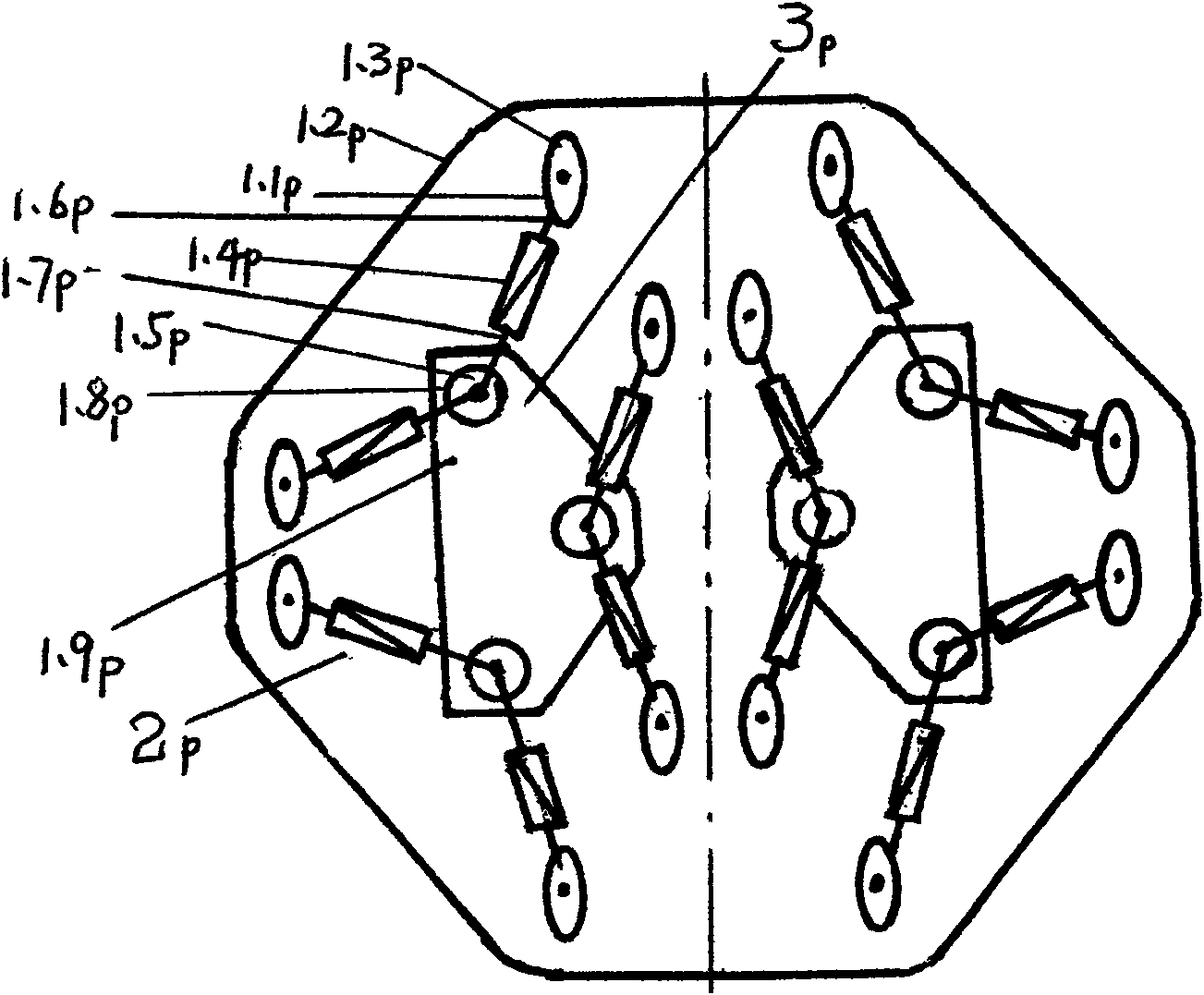
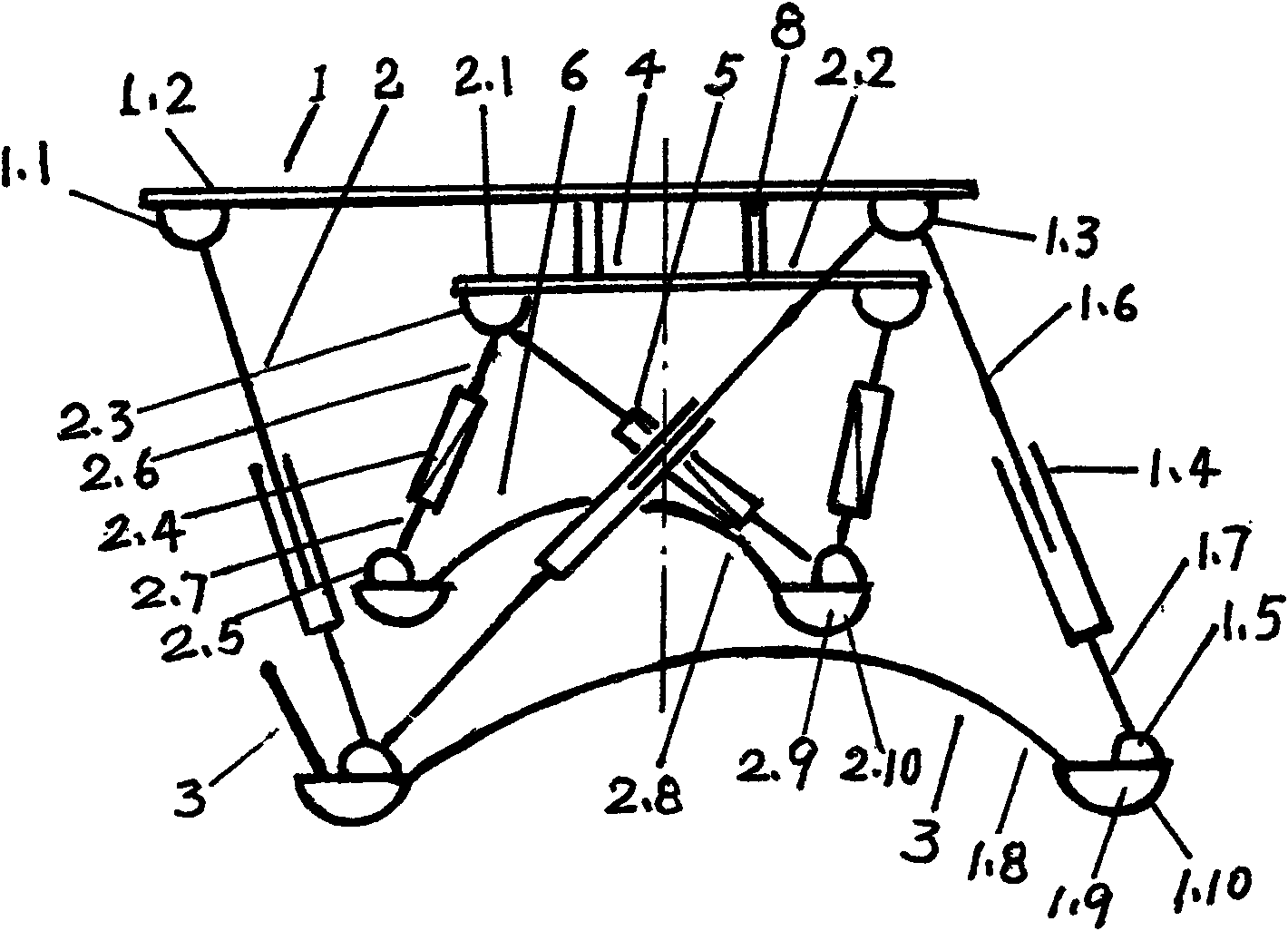
[0276] according to Figure 3-Figure 8 Shown, be a kind of internal and external type structure that branch chain is SPS, internal and external type structure walking robot, outer leg is annular protruding arch of foot, and inner leg is Y-shaped protruding arch of foot. Embodiment 1 is made of two 6SPS, 6-DOF parallel mechanisms. The 6-DOF parallel mechanism consists of an upper platform, a lower platform and six SPS branch chains connecting the upper and lower platforms. From the top view (the size of the parallel mechanism mentioned in this article is compared from the top view, regardless of the size of the height, that is, only the lateral dimension is compared), one parallel mechanism is larger, and the other parallel mechanism is smaller, and the larger one is called The outer leg, the smaller one is called the inner leg (hereinafter the same). The outer leg is a chamfered truncated truss, and the inner leg is a positive truncated prism (the hip joint polygon of the up...
Embodiment 2
[0283] It is a walking robot with internal and external structure with SPS branch chain, 2x 6DOF, circular concave arch on the outer leg and Y-shaped concave arch on the inner leg. The hexagonal protruding arch of the outer leg in embodiment 1 is replaced by a circular concave arch, and the Y-shaped protruding arch of the inner leg is replaced by a Y-shaped concave arch, which is the walking robot of embodiment 2.
[0284] exist Figure 10 Among them, the arch 3 of the foot is the arch of the outer leg, which is a circular concave arch located on the periphery of the arch of the inner leg. It consists of three arch branches 1.8 forming a ring structure, the upper part of the arch is the ankle joint mounting seat 1.9, and the lower part of the foot arch between the two ankle joint mounting seats is the toe 1.10. The arch of foot 6 is the arch of the inner leg, which is a Y-shaped concave arch of the foot and is surrounded by the arch of the outer leg. It is made up of three a...
Embodiment 3
[0286] It is a 2x6DOF walking robot with internal and external structure with SPS branch chain. Figure 11 It is a top view of the arch of foot of embodiment 3. The hexagonal protruding arch of the outer leg in embodiment 1 is replaced by the hexagonal flat arch, and the Y-shaped protruding arch of the inner leg is replaced by the hexagonal flat arch, which is the walking robot of embodiment 3.
[0287] exist Figure 11 Among them, the arch 3 is the arch of the outer leg, which is a hexagonal flat arch located on the periphery of the arch of the inner leg. It is made up of three arch branches 1.8, and the three arch branches form a ring structure, the upper part of the arch is the ankle joint mounting seat 1.9, and the lower part of the foot arch between the two ankle joint mounting seats is the inline big toe 1.10. Arch of foot 6 is inner leg arch of foot, and it is hexagonal flat arch of foot, is positioned at the surround of outer leg arch of foot. It is made up of three...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com