Three-rotational-freedom parallel mechanism driven by rope
A rope-driven, three-rotation technology, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as unbearable pressure, and achieve the effects of low manufacturing cost, easy installation, and large working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
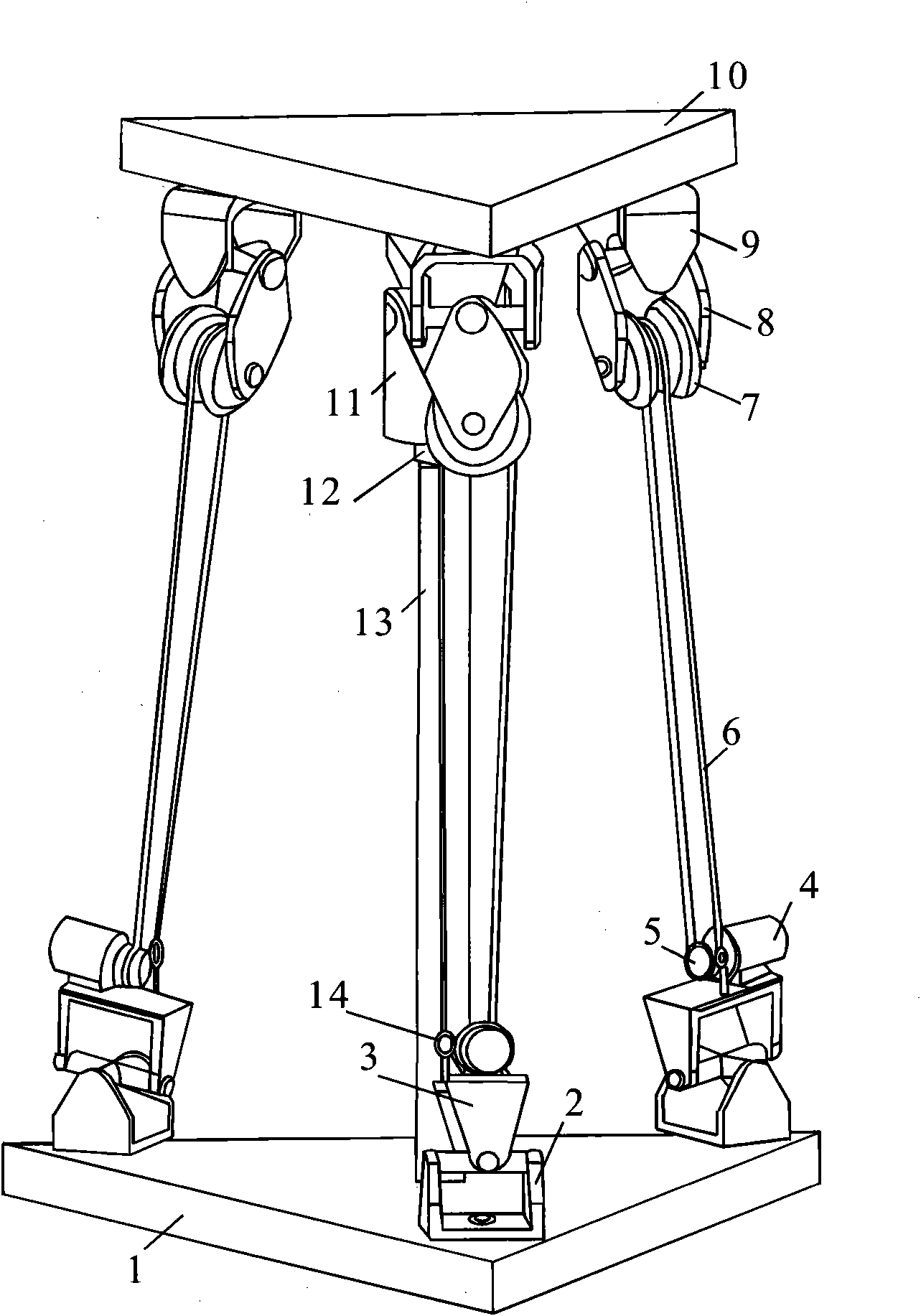
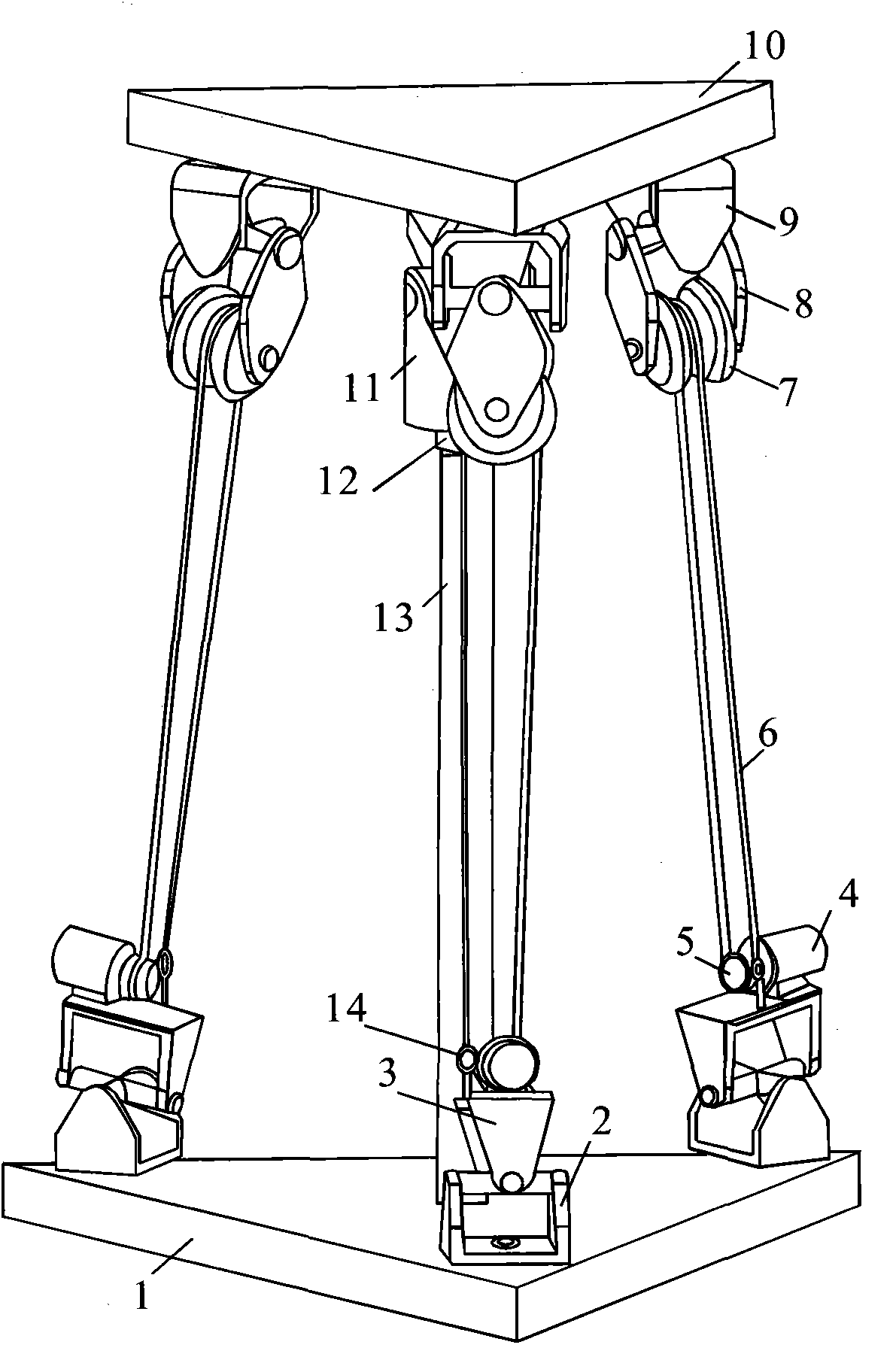
[0019] As shown in Figure 1, the present invention is a three-rotation-degree-of-freedom parallel mechanism driven by a rope, which is mainly composed of a static platform 1, a dynamic platform 10, three active branch chains and a fixed-length branch chain, and each branch chain is connected Between the moving platform 10 and the static platform 1. Among them, the structure of the three active branch chains is the same, and they are all composed of the lower rotating pair 2, the lower Hooke hinge 3, the motor 4, the runner 5, the rope 6, the pulley 7, the tether hook 14, the upper Hooke hinge 8 and the upper rotating joint. The lower Hooke hinge 3 is connected with the static platform 1 through the lower rotating pair 2, the tether hook 14 and the motor 4 are fixed on the upper end surface of the lower Hooke hinge 3, and the runner 5 is connected to the rotating shaft of the motor 4. The Hooke hinge 8 is connected with the moving platform 10 through the upper rotating pair 9, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com