Flexible foot mechanism of humanoid robot
A humanoid robot and flexible foot technology, applied in the field of robotics, can solve problems such as the cylinder of the sole of the foot and the upper platen are stuck, achieve easy installation accuracy and reliability, prolong the service life, and improve the effect of absorption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Further illustrate the present invention below in conjunction with accompanying drawing.
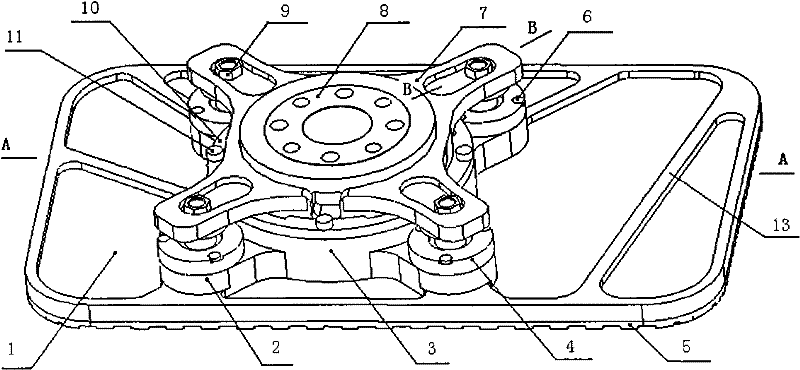
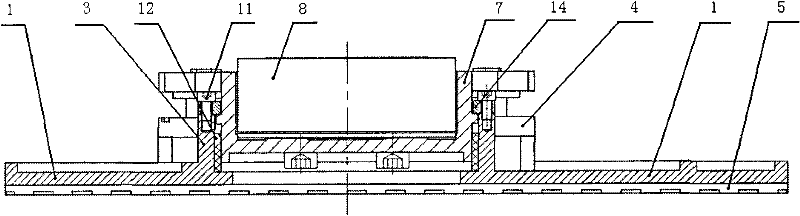
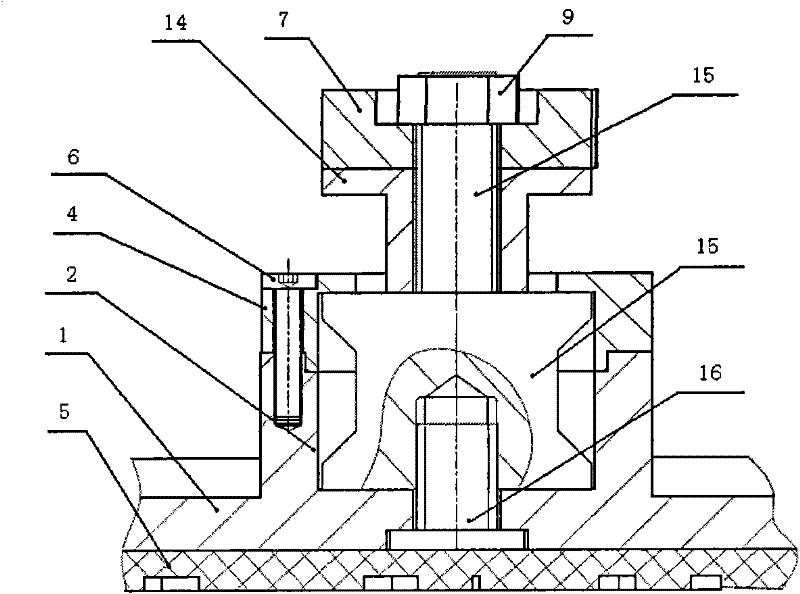
[0017] With reference to accompanying drawing, the flexible foot mechanism of humanoid robot of the present invention comprises sole plate 1, and the bottom of sole plate 1 is pasted with antiskid damping pad 5, and the top of sole plate 1 is fixed with hollow cylinder 3, and hollow cylinder 3 Four cylinders 2 are evenly distributed on the outer peripheral wall of the cylinder, and each cylinder has a built-in shock-absorbing rubber pad 15. The shock-absorbing rubber pad 15 is composed of a large cylinder and a small cylinder that are coaxially connected. In the illustrated example, the shock-absorbing rubber pad 15 The bottom of the large cylinder of the shock rubber pad 15 has an internal thread hole, which is fixed with the sole plate 1 by screws 16. In order to make the flexible foot mechanism integrally firmer, a series of reinforcing ribs 13 can be distributed on the sole pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com