Hexapodous biomimetic wet-sucking wall-climbing robot
A wall-climbing robot and wet suction technology, applied in the field of bionics, can solve problems such as the inability to control the robot's attitude and single movement mode, and achieve the effects of easy gait planning, cost reduction, and improved adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
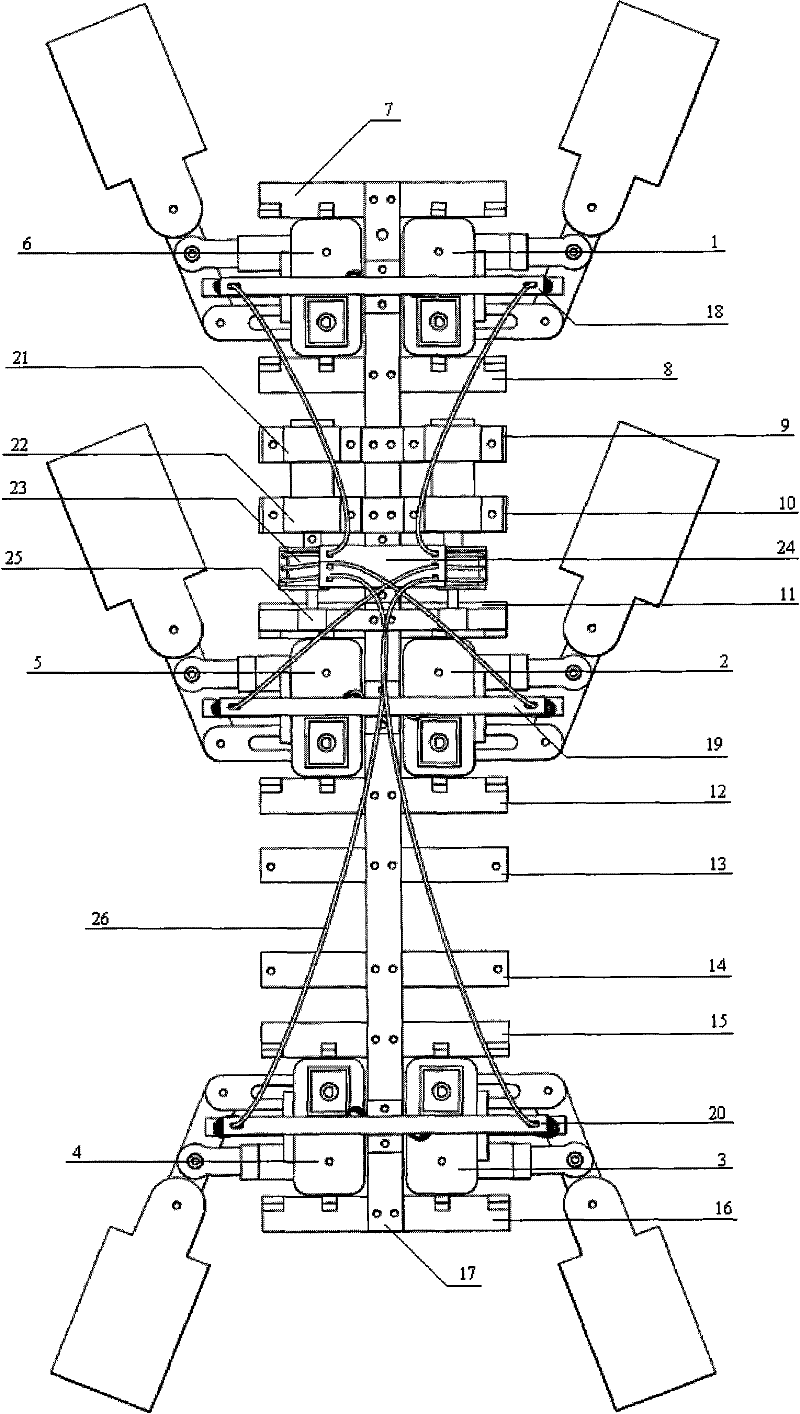
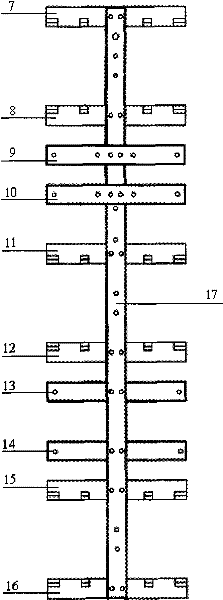
[0036] like figure 1 As shown, the hexapod bionic wet-absorbing wall-climbing robot of the present invention includes a trunk skeleton 17, bionic limbs, a motor, a drive circuit, a pre-compression structure, a cam structure, and a drawstring structure. The torso skeleton is the supporting structure of the robot, and the bionic limbs, motors, drive circuits, preloading structures, cam structures and pull rope structures are all installed on the torso skeleton; the bionic limbs, as the six limbs of the robot, are controlled by motors to drive the robot forward ; The pre-compression structure is used to increase the contact area between the foot pad of the robot foot and the wall surface to increase the adsorption force; the cam structure and the drawstring structure are used to control the peeling process of the foot pad, which is easy to peel of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com