Method for controlling rigid spacecraft for target attitude tracking
A technology of target attitude and control method, which is applied in the observation of astronauts, guidance devices of astronauts, and astronaut equipment, etc., can solve the problem of inability to eliminate the inherent vibration of sliding mode variable structure, and achieves the solution of inherent vibration, Guaranteed stability and improved control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
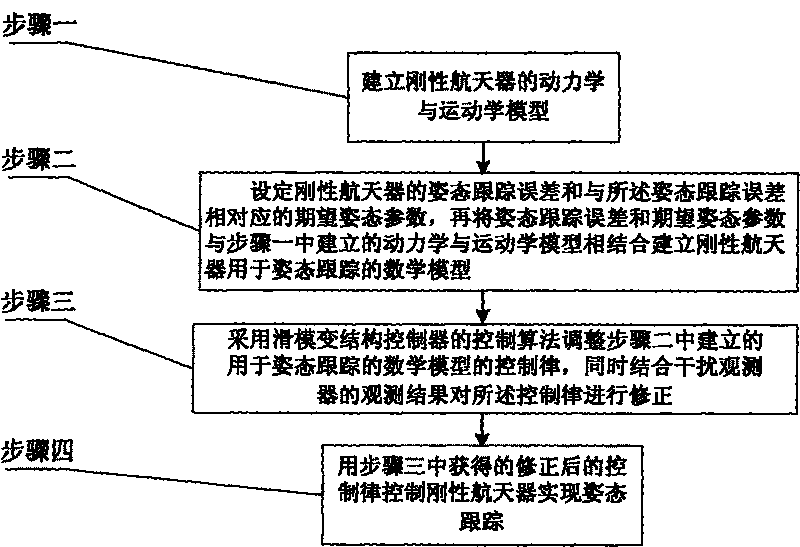
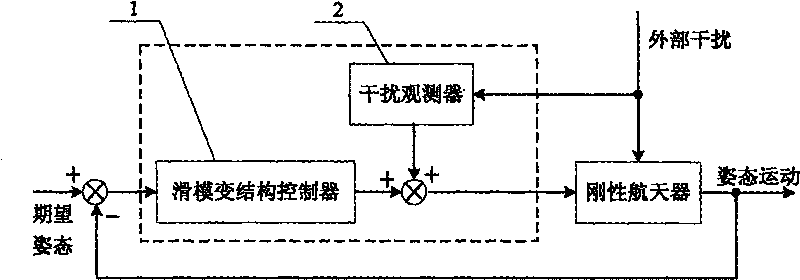
[0012] Specific implementation mode one: the following combination figure 1 and figure 2 Describe this embodiment, this embodiment realizes based on sliding mode variable structure controller 1 and disturbance observer 2, and it comprises the following steps:
[0013] Step 1: Establish the dynamics and kinematics model of the rigid spacecraft;
[0014] Step 2: Set the attitude tracking error of the rigid spacecraft and the expected attitude parameters corresponding to the attitude tracking error, and then combine the attitude tracking error and the expected attitude parameters with the dynamics and kinematics model established in step 1 to establish A mathematical model for attitude tracking of rigid spacecraft;
[0015] Step 3: using the control algorithm of the sliding mode variable structure controller 1 to adjust the control law of the mathematical model used for attitude tracking established in step 2, and modify the control law in combination with the observation resu...
specific Embodiment approach 2
[0017] Specific embodiment two: this embodiment is a further description of step one in embodiment one: the dynamic model of the rigid spacecraft in step one is:
[0018] J ω · + ω × ( Jω ) + u = d ,
[0019] The dynamic model of a rigid spacecraft is:
[0020] q · = 1 2 Ω ( ω ) · q ,
[0021] In the formula, J is the moment of inertia matrix of the spacecraft, ω is the angular velocity vector of the spacecraft relative to the inertial coordinate system in the body coordinate system, u is the control law, and d is the external disturbance moment; q is the attitude quaternion of the rigid spacecraft, and satisfy the constraints Ω(ω) is the input matrix containing...
specific Embodiment approach 3
[0022] Specific Embodiment Three: This embodiment is a further description of Step 2 in Embodiment 1: the attitude tracking error in Step 2 is set to q e and ω e , the desired attitude parameter is set to q d and ω d , define the quaternion multiplication, then the formula for establishing the relationship between the attitude tracking error and the expected attitude parameters is:
[0023] q e = q d - 1 ⊗ q ,
[0024] ω e =ω-A×ω d ,
[0025] In the formula Represents the quaternion multiplication, A represents the transformation matrix from the orbital coordinate system of the spacecraft to the body coordinate system, combines the formula and the dynamics and kinematics model established between the attitude tracking error and the expected attitude parameters, and establishes a method for attitude The mathematical...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com