Magnetic field measuring device based on visual guiding robot
A visual guidance and magnetic field measurement technology, applied in the direction of measuring devices, measuring magnetic variables, instruments, etc., can solve problems such as poor safety, failure to meet positioning requirements, and lack of accuracy, so as to improve the level of automation and intelligence, and improve detection efficiency and detection accuracy, to overcome the effect of poor positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
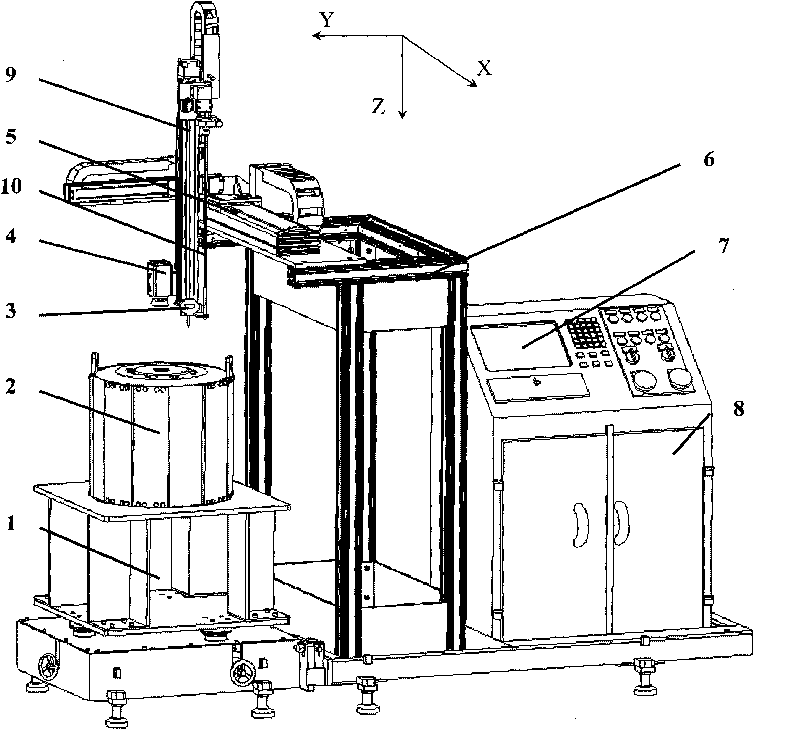
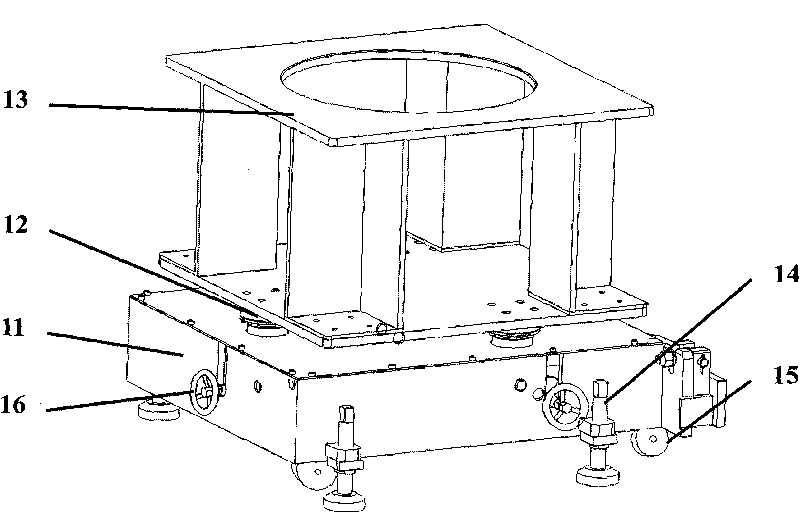
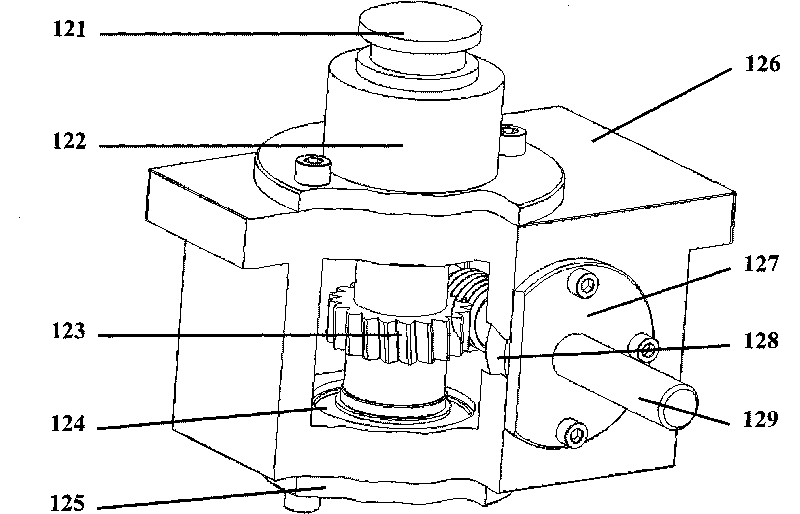
[0022] Below in conjunction with embodiment and accompanying drawing, technical solution of the present invention is described in detail as follows:
[0023] The magnetic field measurement device (hereinafter referred to as the device based on the vision-guided robot designed by the present invention, see Figure 1-6 ) is a device developed according to the special detection requirements of the Institute of Electronics, Chinese Academy of Sciences (for the deep hole detection problems commonly faced by radar multi-beam klystron electromagnetic focusing systems). The technical essential problem to be solved by the device of the present invention is to obtain the precise position of each hole center of the through-hole to be tested in the klystron electromagnetic focusing system through machine vision technology, and realize the magnetic field strength of each through-hole to be tested by dragging the probe with a Cartesian coordinate robot. Measurement. The most important and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com