Tetrahedral rolling robot with parallel mechanism
A robot and tetrahedron technology, applied in the field of robots, to achieve the effect of simple structural design, great flexibility of movement, and overcoming the problem of overturning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described in detail below in conjunction with the accompanying drawings.
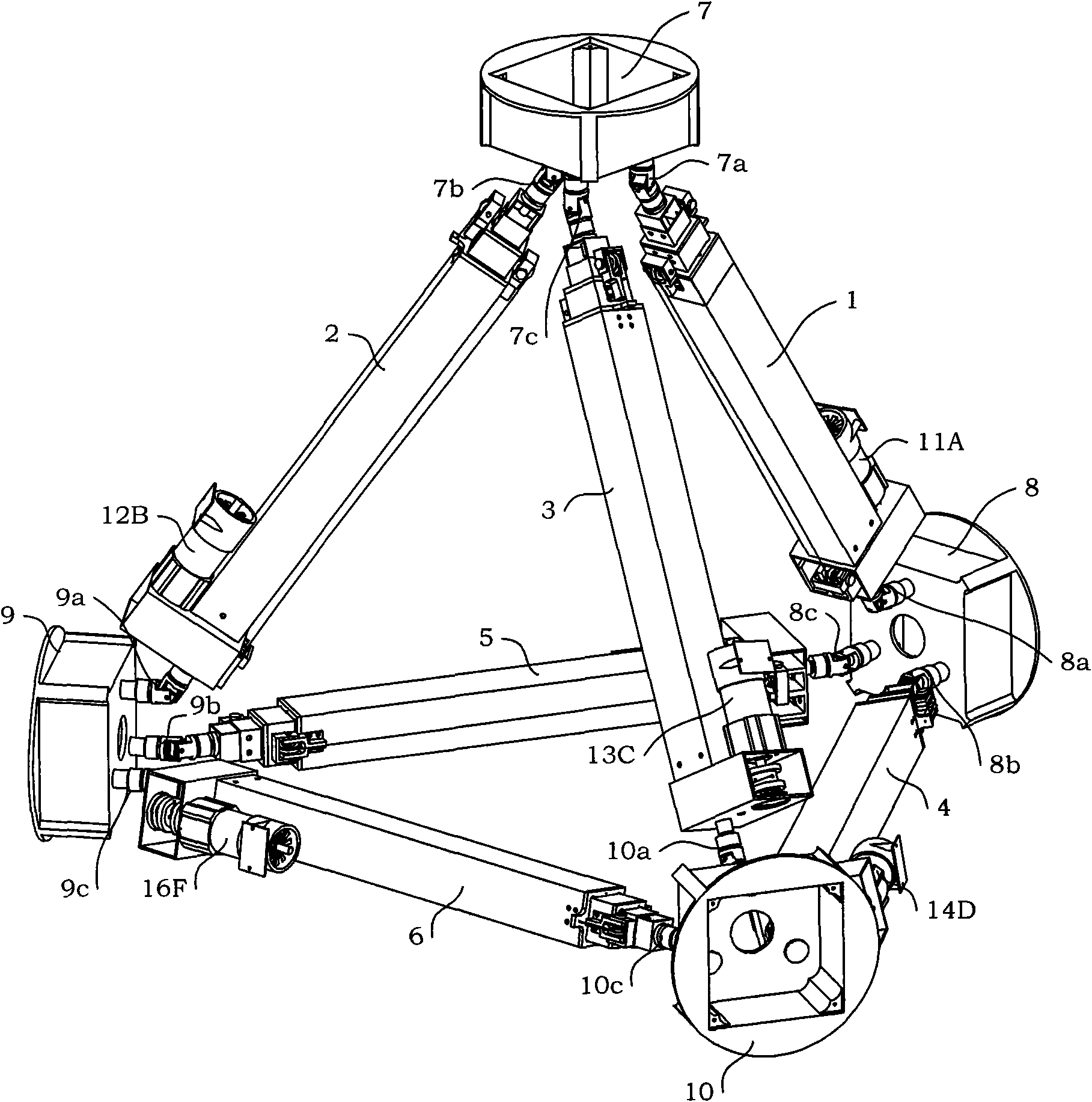
[0054]The motion mode of the tetrahedron tumbling robot designed by the present invention is different from that of traditional mobile robots. Traditional robots need to rely on supporting devices (wheels, crawlers, multi-legged walking legs, etc.) to advance, and the stability of the robot must be guaranteed so that it cannot tip over. And the motion mode of the tetrahedron tumbling robot of the present invention utilizes the characteristic of the tetrahedron topple after losing stability and rolls forward.
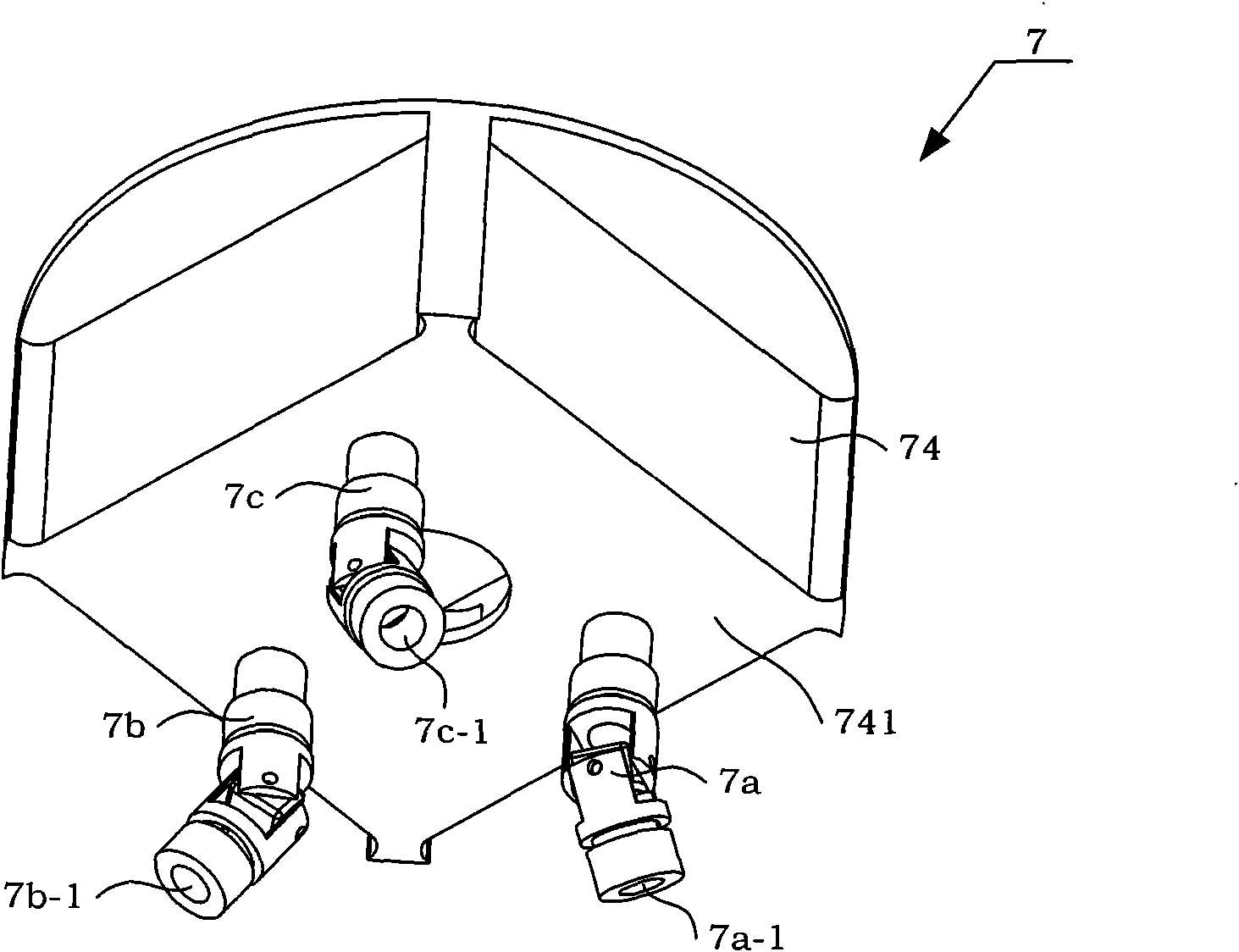
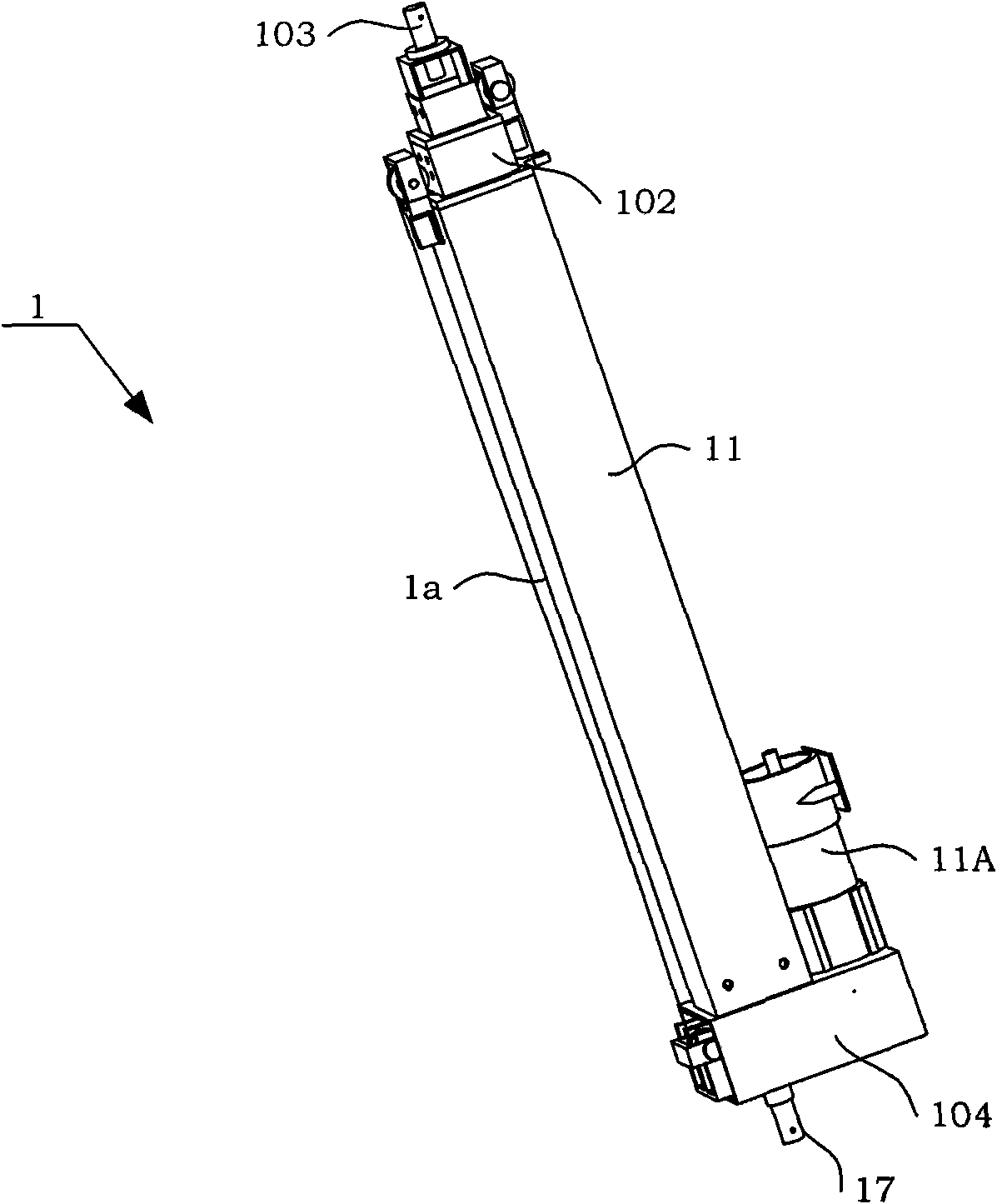
[0055] see figure 1 , figure 2 , image 3 As shown, a tetrahedral rolling robot with a parallel mechanism of the present invention is composed of six telescopic arms and four gusset plate assemblies, each of which is composed of a gusset plate and three universal joints, and The three universal joints are arranged in an equilateral triangle on the b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com