Finger device of double-joint parallel under-actuated robot
A robotic finger and underactuated technology, applied in the field of anthropomorphic robotic hands, can solve the problems of difficult end pinching and grasping effects, high maintenance costs, high operating threshold, etc., and achieve the effect of automatic size adaptation, low cost, and easy control
Inactive Publication Date: 2011-01-05
WUXI RES INST OF APPLIED TECH TSINGHUA UNIV +1
View PDF3 Cites 30 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Advanced robot dexterous hand control is very flexible, but it has the following disadvantages: a large number of motors, complex mechanisms, difficult real-time control, high cost of use and maintenance, and requires high-level personnel to operate, and the operating threshold is very high
The shortcomings of this type of underactuated mechanical finger device are: the finger is always in a straight state before touching the object, the action and appearance are quite different from the human hand, and the anthropomorphism is not enough; the grasping method is mainly the gripping method, which is difficult To achieve a better grasping effect at the end; when there is no object to grasp, it is impossible to make a fist similar to a human hand; it is also difficult to achieve a natural bending state of each joint when the end finger segment is pinching an object
Comprehensively, it can be seen that the existing coupled manipulators and underactuated manipulators have relatively large deficiencies.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
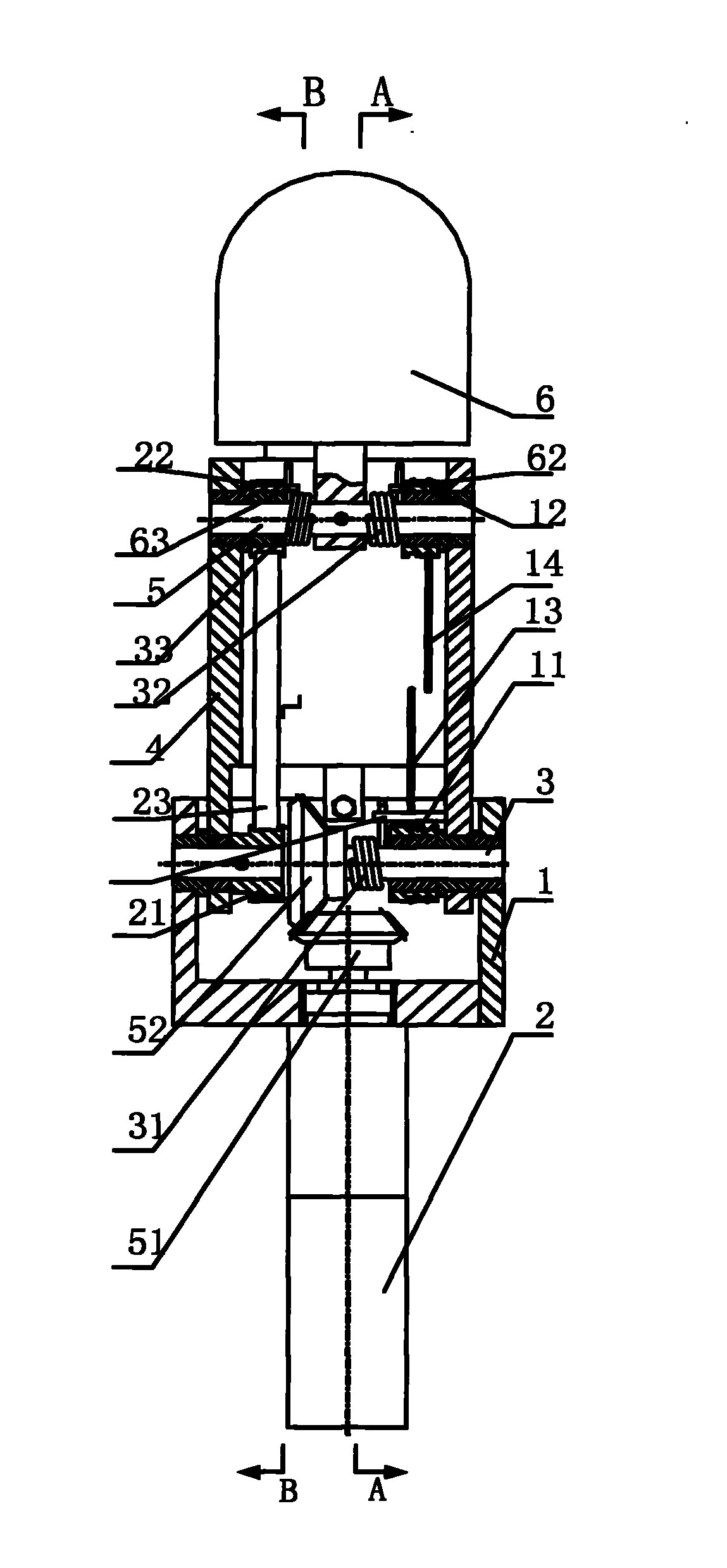
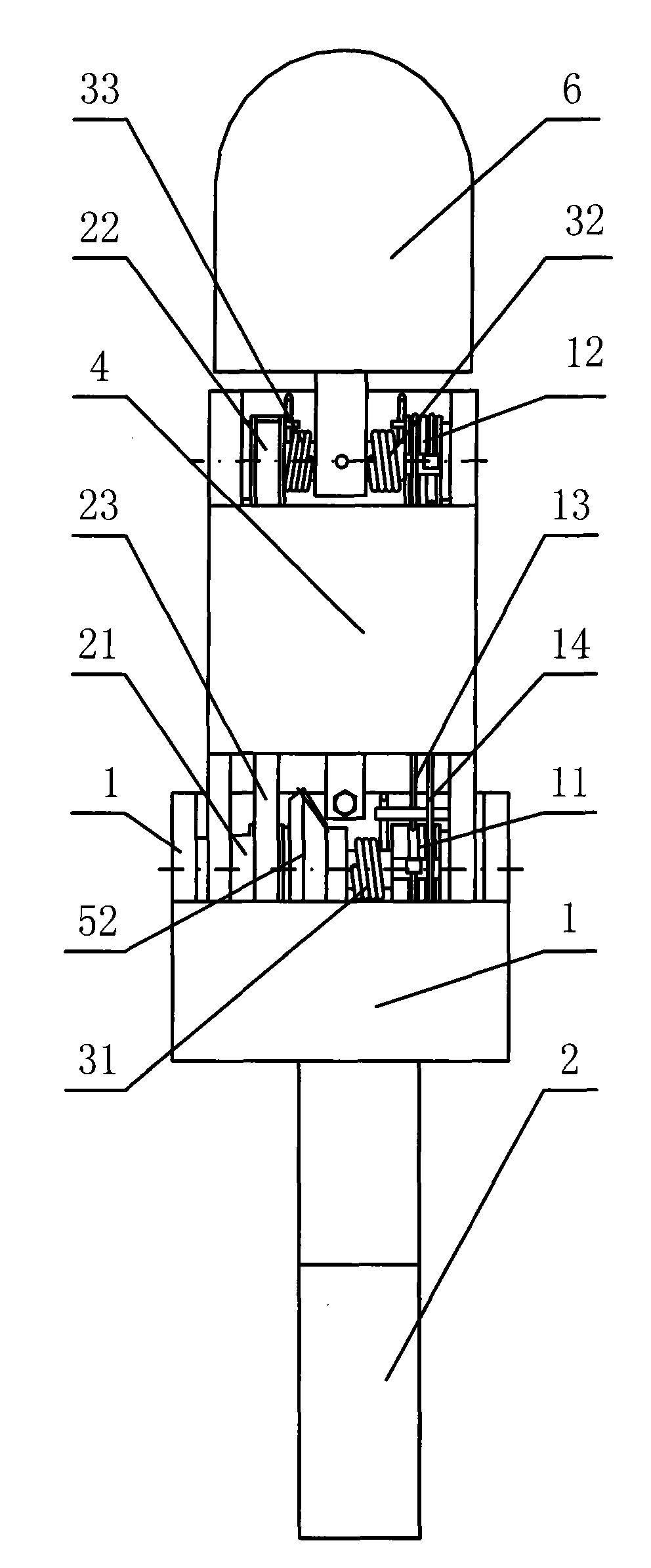
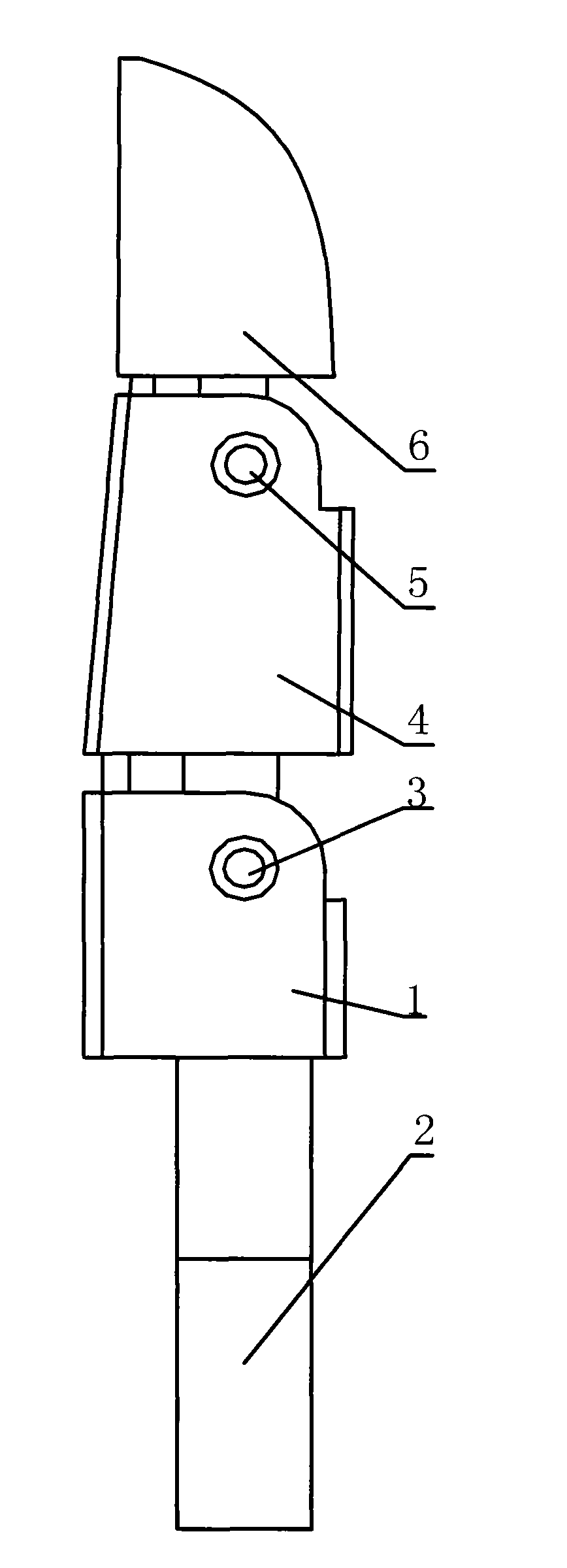
The invention relates to a finger device of a double-joint parallel under-actuated robot, belonging to the technical field of human simulation robot hands and comprising a pedestal, an electric motor, a reducer, a near joint shaft, a middle finger section, a far joint shaft, an end finger section, a coupling transmission mechanism, an under-actuated transmission mechanism and a plurality of springs. The device comprehensively realizes the fusion of a coupling grasping effect and a self-adaptive under-actuated grasping effect by adopting the electric motor, the coupling transmission mechanism,the under-actuated transmission mechanism and a plurality of springs, i.e. the effect of multi-joint coupling rotation is presented before the fingers touch an object, thereby being exceedingly anthropomorphic and simultaneously being also beneficial to grasping the object by a pinching mode; the effect of a multi-joint under-actuated mode is adopted after the fingers touch the object, thereby having the advantage of the self adaption to the size dimensions of the grasped object and simultaneously being beneficial to grasping the object by a holding mode; in addition, the device has low cost and easy control; the appearance and the motion are similar to those of hands, and therefore, the finger device is suitable for the human simulation robot hands.
Description
Two-joint Parallel Underactuated Robot Finger Device technical field The invention belongs to the technical field of anthropomorphic robot hands, and in particular relates to the structural design of a double-joint parallel underactuated robot finger device. Background technique Human hands are very important to humans, just like humans, robotic hands are equally important to anthropomorphic robots. Robots carry out work by grasping tools with their hands, or perform spatial displacement operations by grasping objects with their hands. At present, the design of the robot hand has received widespread attention. Due to the many degrees of freedom of the joints of the hand, its small size, large output requirements, and complex control, it has brought many technical problems to this field. One of the key points and difficulties. Advanced robot dexterous hand control is very flexible, but it has the following disadvantages: a large number of motors, complex mechanisms, diffi...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Patents(China)
IPC IPC(8): B25J15/08
Inventor 张文增李国轩
Owner WUXI RES INST OF APPLIED TECH TSINGHUA UNIV
Features
- R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
Why Patsnap Eureka
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Social media
Patsnap Eureka Blog
Learn More Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com