Common distributed control system for humanoid robot
A humanoid robot and general control technology, applied in the direction of comprehensive factory control, program control device, comprehensive factory control, etc., can solve the problems of increasing the difficulty of humanoid robot system debugging, unfriendly user interface, poor performance support, etc., to achieve Easy to transplant and improve, meet high real-time performance, and easy to maintain
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. The following examples are not intended to limit the present invention.
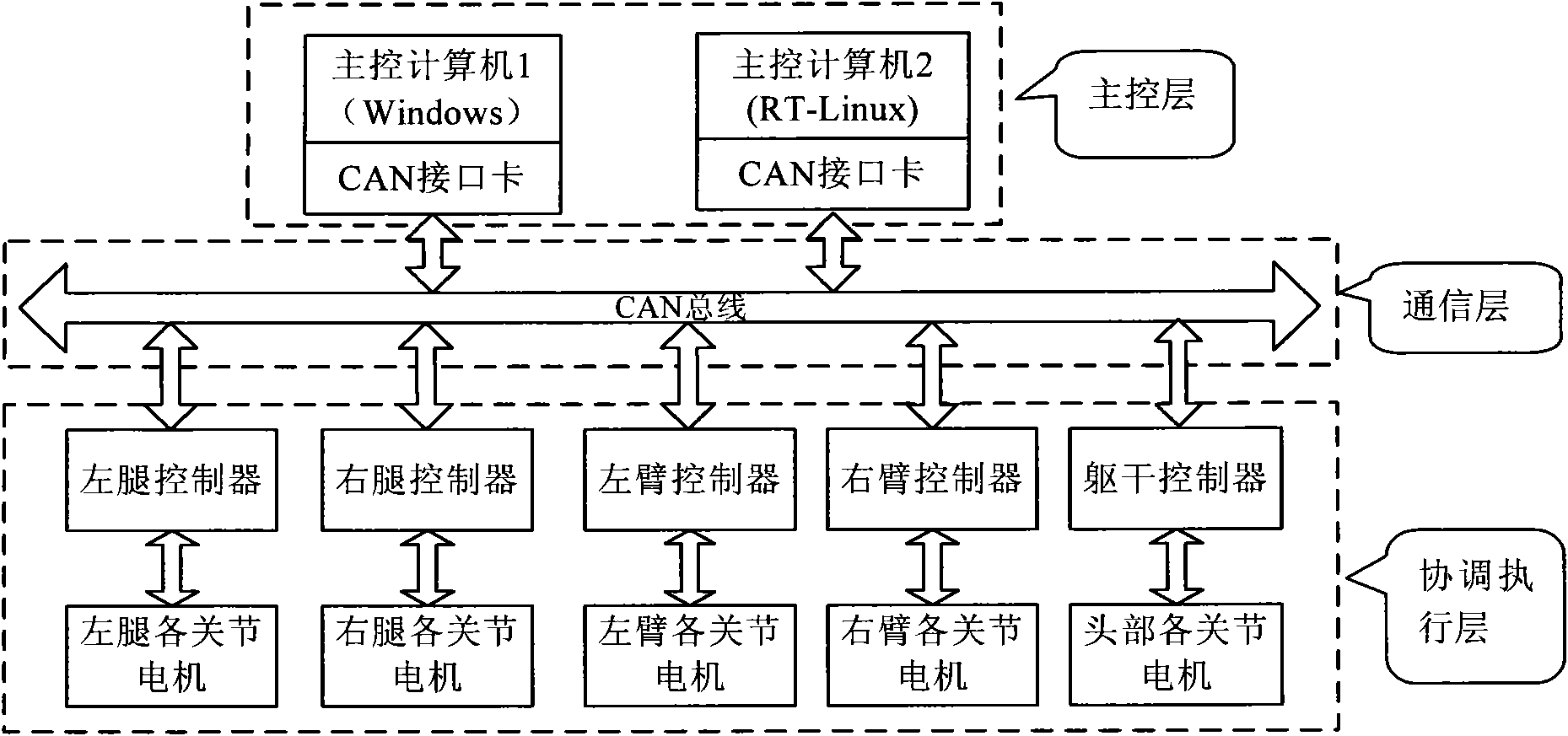
[0017] figure 1 It is a structural schematic diagram of the general control system of the distributed humanoid robot of the present invention. The entire control system adopts the method of centralized management and decentralized control, and is divided into three layers according to the structure and function of the control system: the main control layer, the communication layer, and the coordination execution layer.
[0018] The main control layer adopts a dual-host structure to generate robot joint motion sequences and coordinate each joint to complete specified actions. The main control layer consists of two main control computers, one works under the real-time system, which has reliable stability and real-time performance, so the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com