Depth map real-time acquisition algorithm based on array camera
A real-time acquisition and camera technology, applied in the field of 3D depth information acquisition systems, can solve the problems of sudden depth change, low resolution, and broken 3D raw data, and achieve fast and simple effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below, the present invention will be further described in conjunction with the accompanying drawings and specific embodiments.
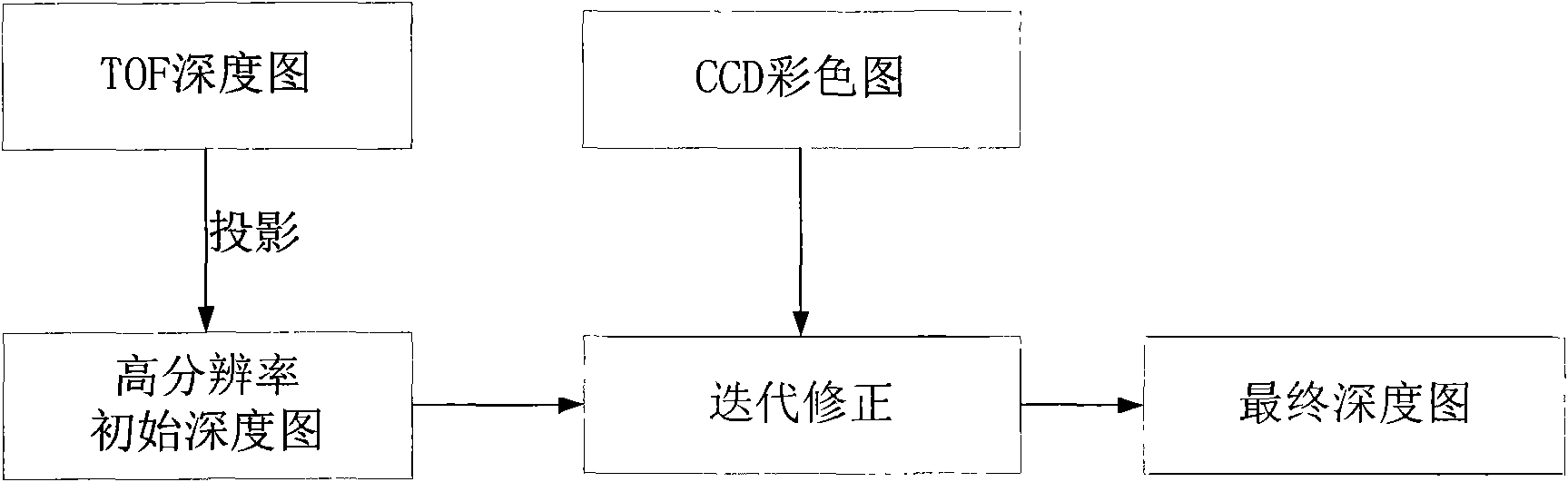
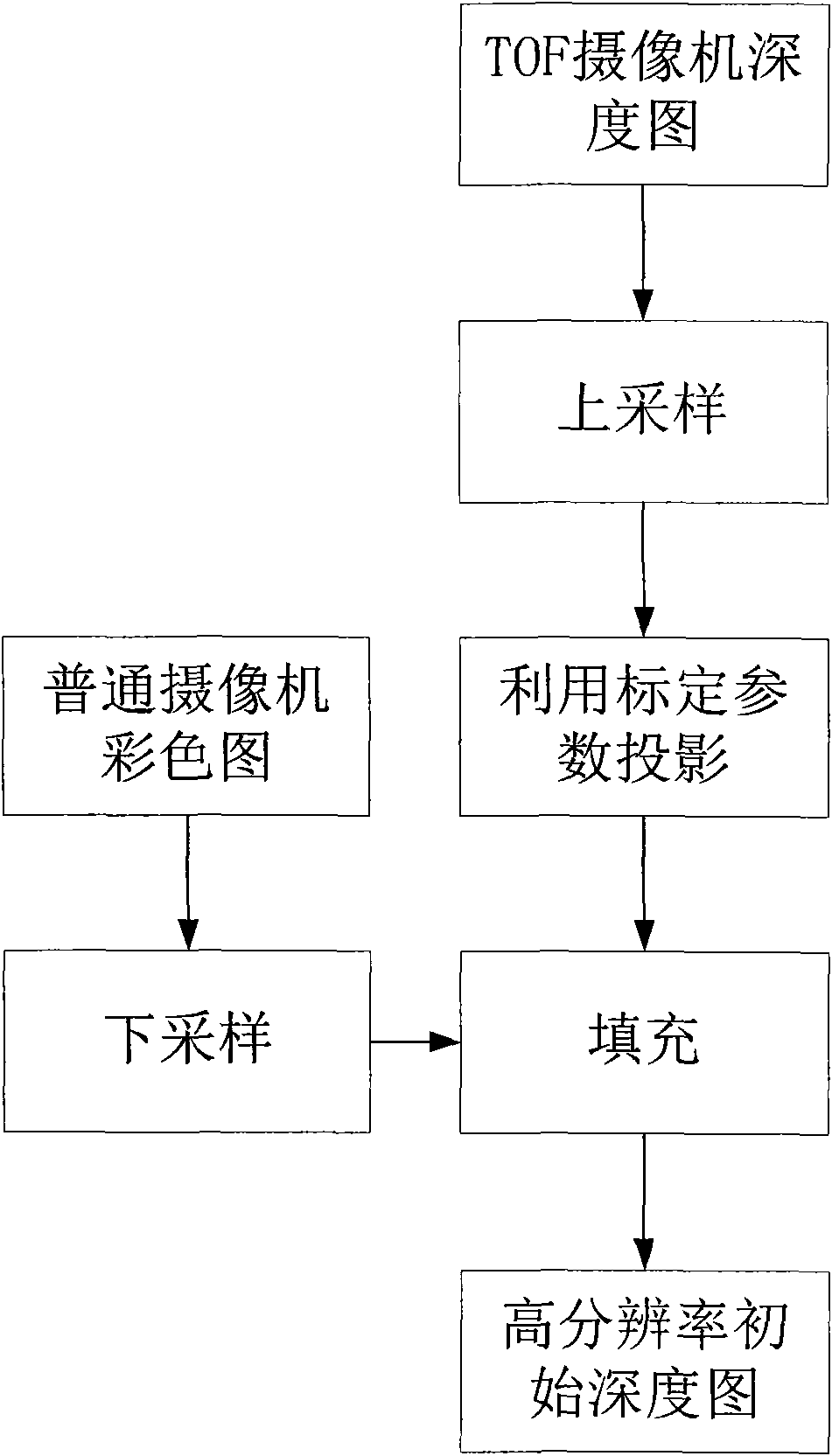
[0031] The visible light camera used in this embodiment uses a CCD sensor, which can provide a color image or a grayscale image with a resolution of 768×576. The 3D camera used is a Swiss Ranger 3000 (TOF camera), which can provide a resolution of 176× 144 depth and grayscale images.
[0032] The specific calibration method of the camera array is as follows: first, down-sampling the grayscale image of each CCD camera to make its resolution 384×288, and upsampling the grayscale image of the TOF camera to make its resolution 352 ×288; Then, use the traditional flat-panel camera calibration method to calibrate each CCD camera and TOF camera (Zhang Zhengyou’s flat-panel camera calibration method), and obtain the parameters projected from the TOF camera to each CCD camera: translation matrix T = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com