Control method for multi-robot system
A multi-robot, control method technology, applied in the directions of comprehensive factory control, comprehensive factory control, adaptive control, etc., can solve the problems of network performance bottleneck, large delay jitter, low satisfaction and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
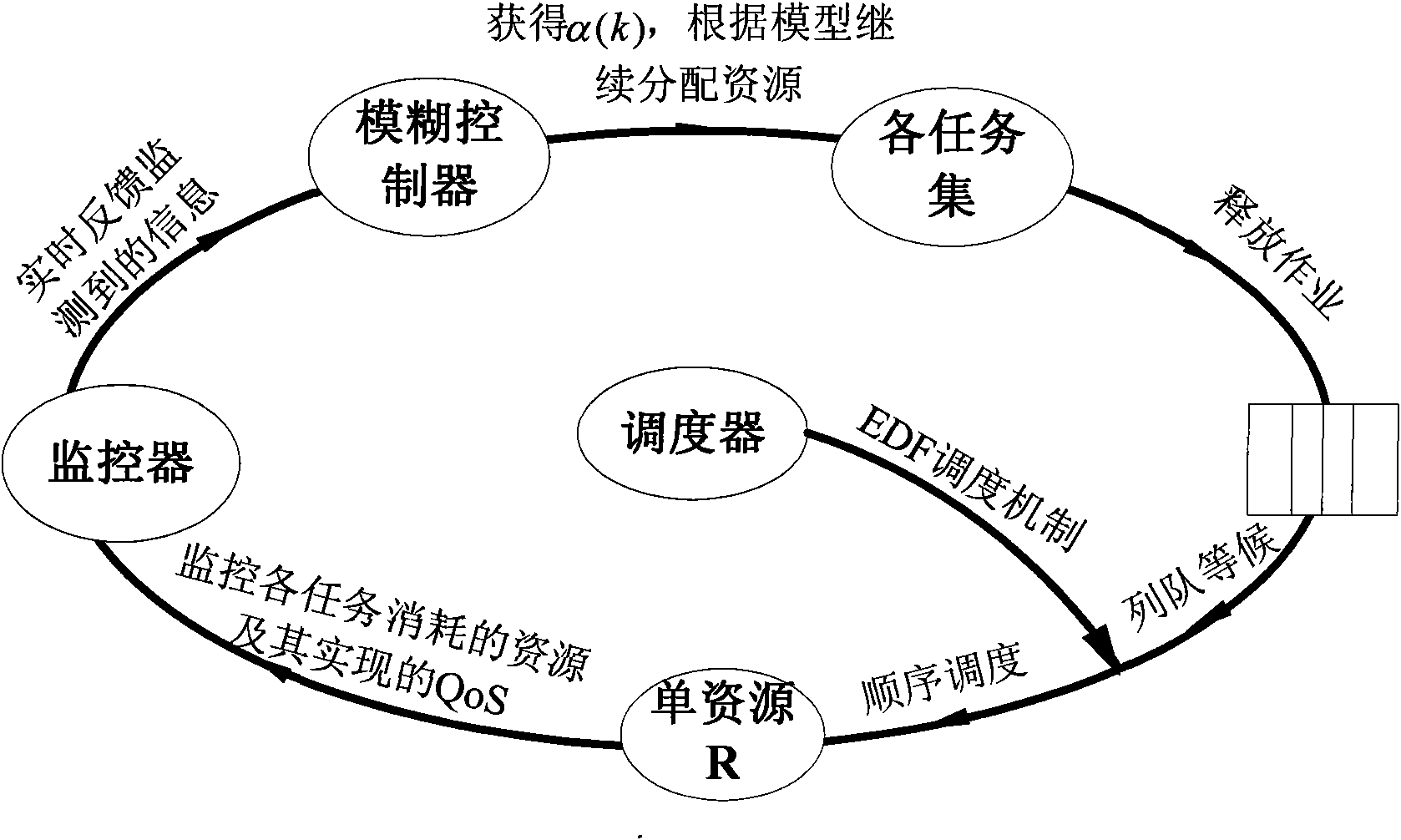
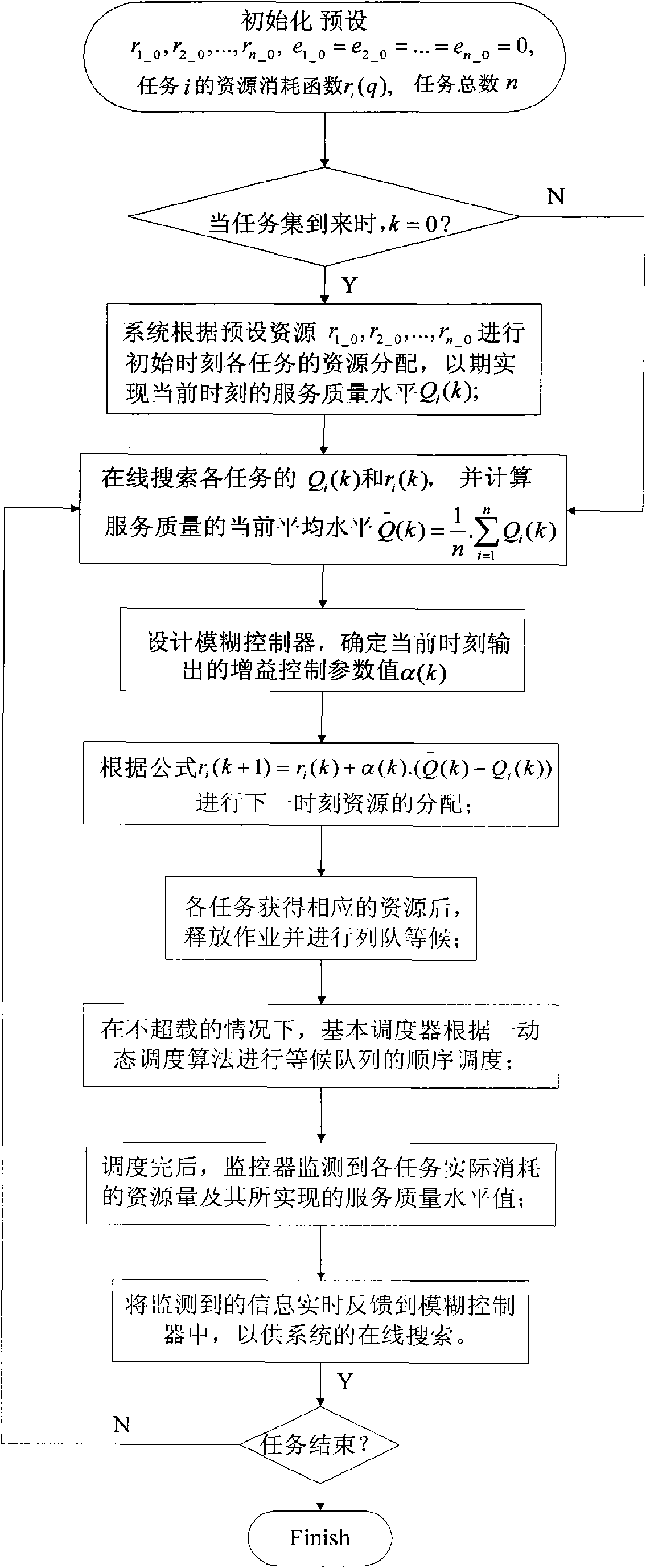
[0032] The present invention proposes a control method for multi-robot systems-a single-resource dynamic allocation method based on fuzzy control. Aiming at the inability to quickly adapt to the fixedness of gain control parameters and the dynamic changes of the network environment in the adaptive control method, the automatic The parameters in the adaptive method are changed from a fixed value to a selected interval, and a new dynamic allocation method based on fuzzy control is obtained. Compared with the adaptive method, this method achieves a higher level of speed in realizing the fair allocation of resources for each competing task in a multi-robot system; it has stronger robustness for the network environment with complex and changeable loads in the real-time system; At the same time, the system has better resistance to various external interferences; the system can still maintain a high resource utilization rate, so the system performance is improved and the stability is enh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com