Small-sized unmanned aerial vehicle automatic landing leveling control method and apparatus
A technology of a small unmanned aerial vehicle and a control method, which is applied in non-electric variable control, position/direction control, control/regulation system and other directions, can solve the problem that the speed of the unmanned aerial vehicle is small, cannot provide information that meets the lifting speed and acceleration information, low altitude
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The UAV automatic landing leveling control method of the present invention will be further described below in conjunction with the accompanying drawings and examples.
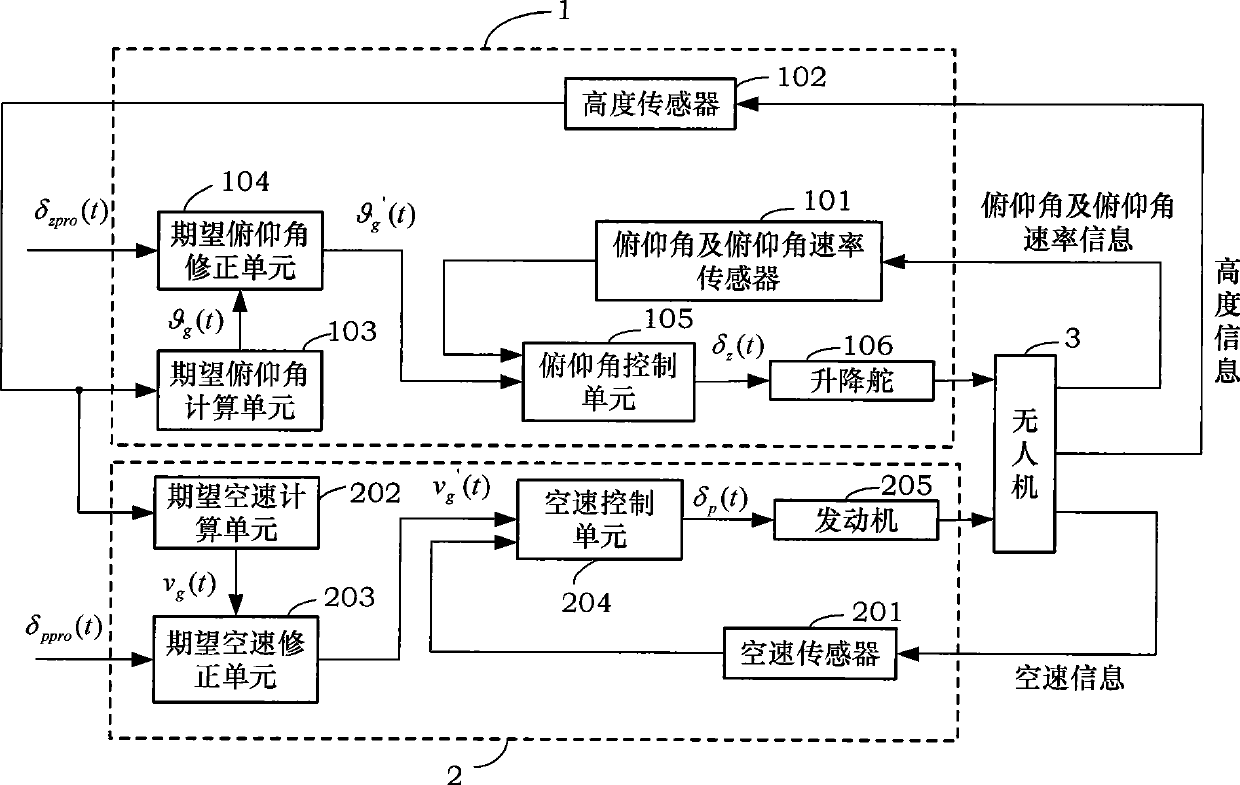
[0050] Such as image 3 As shown, the control device designed in the control method for automatic landing and leveling of small UAVs provided by the present invention is composed of two control modules, the pitch angle control loop 1 and the airspeed control loop 2 .
[0051] Among them, the pitch angle control loop 1 is composed of a pitch angle and pitch angle rate sensor 101 , a height sensor 102 , a desired pitch angle calculation unit 103 , a desired pitch angle correction unit 104 , a pitch angle control unit 105 and an elevator 106 . The expected pitch angle calculation unit 103 calculates the expected pitch angle according to the height information of the unmanned aerial vehicle 3 collected by the height sensor 102 The desired pitch angle and the amount of elevator stick δ zpro (t) Correspondi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com