Navigating and steady aiming method of navigation / steady aiming integrated system
A stable pointing and platform technology, applied in the field of inertial navigation, can solve the problems of unsuitable inertial navigation system, difficulty in attitude alignment accuracy and alignment speed, and low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
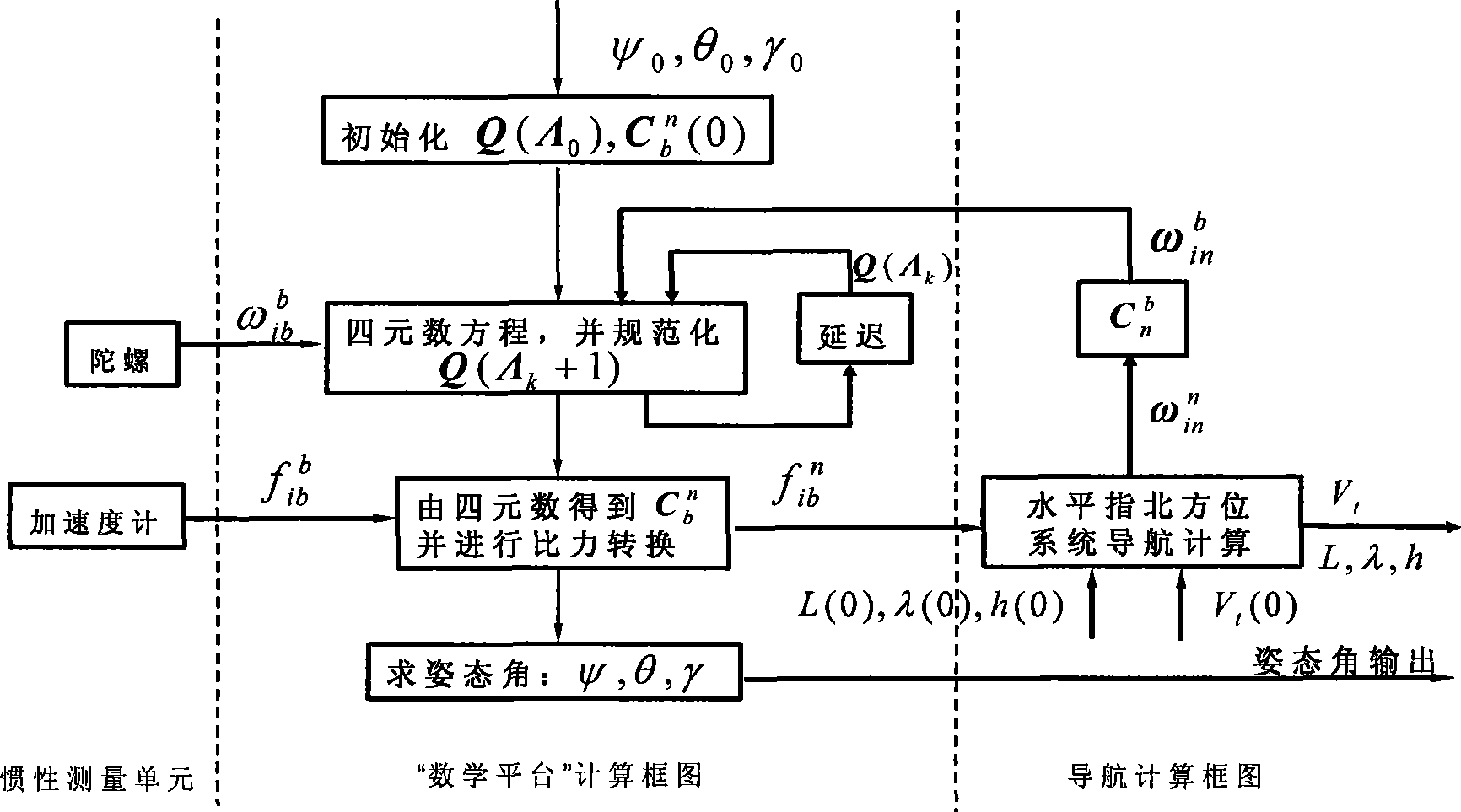
[0021] In the traditional vehicle-mounted integrated system, it may not be able to provide all-round attitude information, speed, and position information, or the navigation system and the stabilization system cannot work at the same time. The present invention improves on the basis of the traditional integrated system, such as figure 1 As shown, the inertial measurement unit (IMU) is installed on the photoelectric stabilized aiming platform with random rotation. The IMU is composed of three orthogonally installed fiber optic gyroscopes and three orthogonally installed accelerometers. The stabilized aiming platform has For the rotation function, the gyro signal in the IMU is output to the platform stabilization circuit to realize the function of stabilizing the platform. At the same time, the signals of the gyroscope and accelerometer in the IMU are output to the inertial navigation calculation part to calculate the attitude, speed and position information of the stable aiming...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com