Large depth unmanned submersible and depth composite control method thereof
A submersible and large-depth technology, applied to underwater ships, underwater operating equipment, ships, etc., can solve the problems of high energy consumption, slow response of actuators, unfavorable long-term stay and operation, etc., to achieve less energy consumption, Effects that facilitate precise depth determination and facilitate precise depth determination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention is described in more detail below in conjunction with accompanying drawing example:
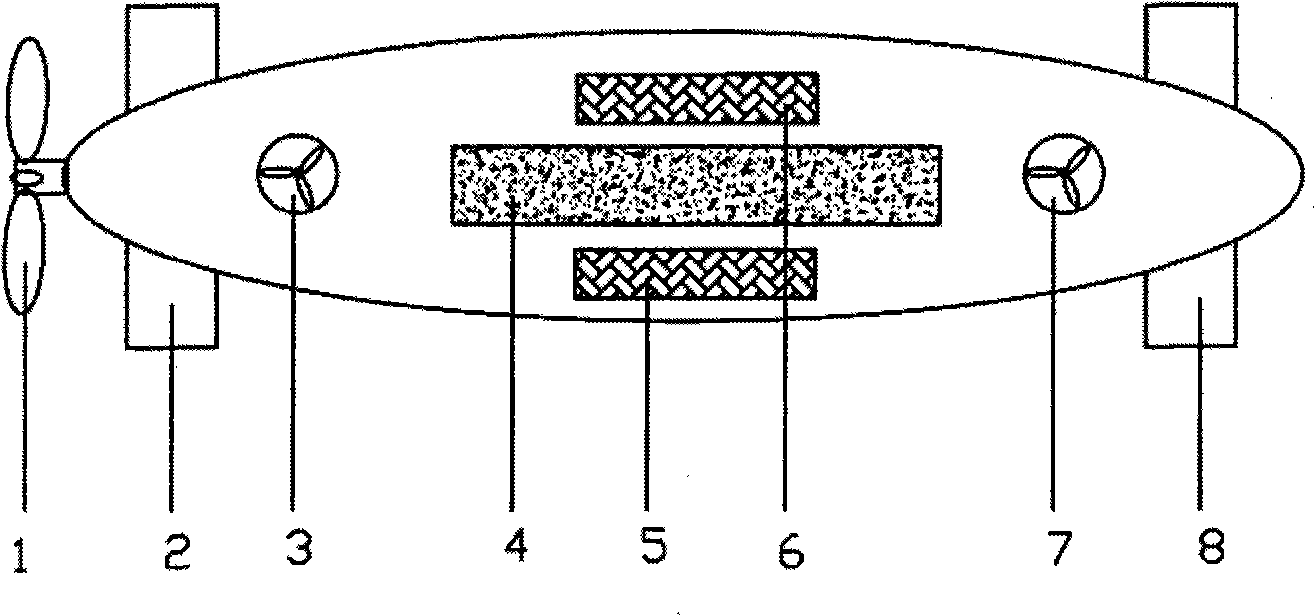
[0025] combine figure 1 , the composition of the large-depth unmanned submersible includes the main body of the submersible, the stern main propeller 1 installed at the stern of the submersible main body, the bow horizontal wing 8 installed at the stern of the submersible main body, and the The stern horizontal wing 2 is provided with a buoyancy adjustment water tank 4 inside the main body of the submersible, and the stern vertical channel propeller 3 and the bow vertical channel propeller 7 are respectively provided at the stern and bow of the submersible main body. The water tank, bow horizontal wing, stern horizontal wing, stern main propeller, bow vertical channel propeller, and stern vertical channel propeller are all connected to a PC / 104 computer, PC / 104 computer includes CPU core board, DA / AD card, 8 serial port cards, digital IO board, pulse generator b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com