Control method for acrobatic motion of pendulums of under-actuated double pendulum system
A technology of motion control and underactuation, applied in the direction of adaptive control, electrical program control, general control system, etc., can solve the problems of underactuation, large-scale nonlinear control, complex target tasks, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0083] Such as Figure 8-9 As shown, an underactuated double pendulum system pendulum bar acrobatic movement control method uses the underactuated double pendulum system and the controller to decompose and control the first set of acrobatic movements that have been programmed through the program. The steps are as follows:
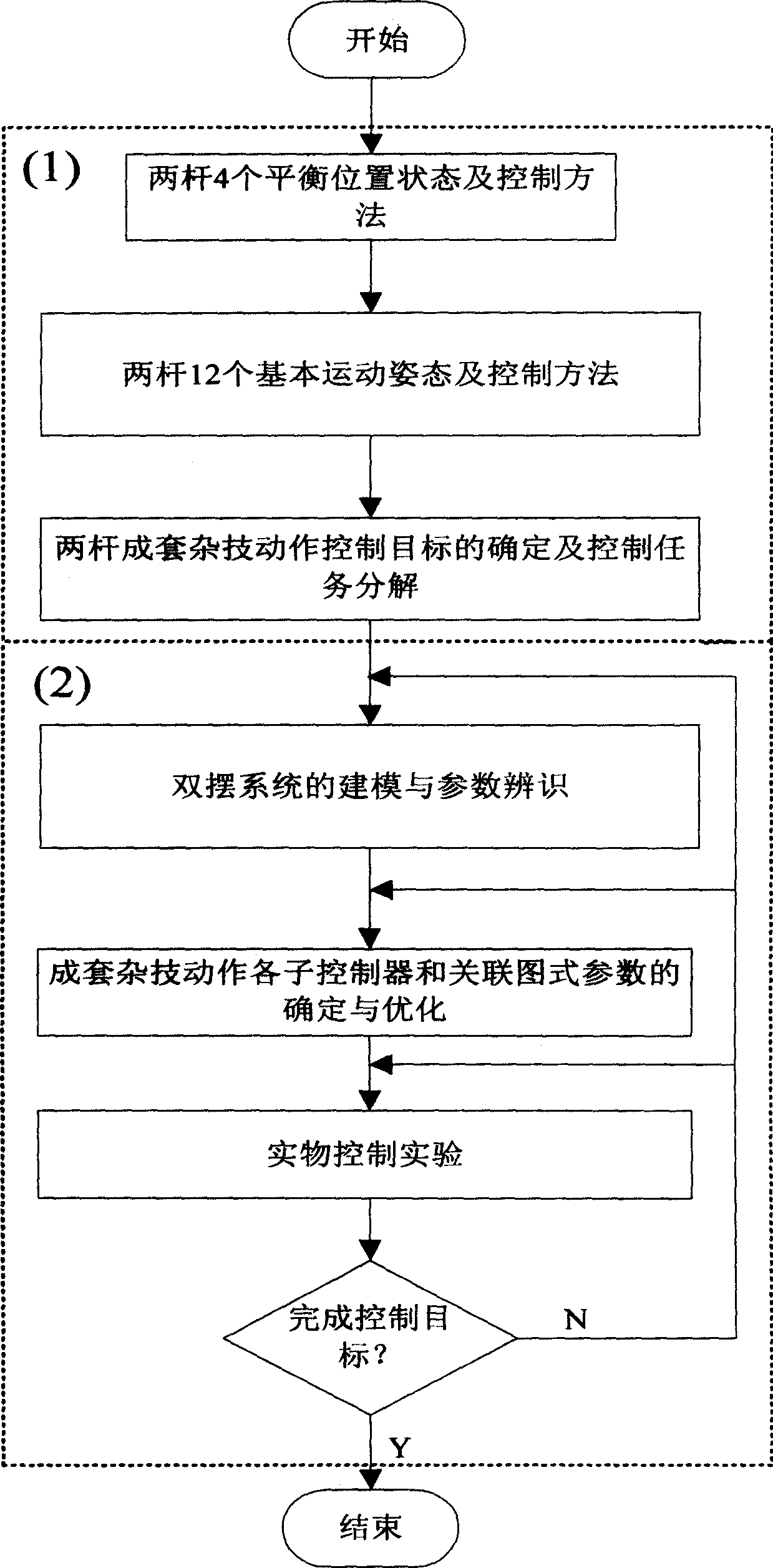
[0084] 1) Arrangement of a complete set of acrobatic movements and decomposition of control objectives in stages
[0085] For the first set of acrobatic movements that have been compiled by the computer to control the target, according to the sequence of their movements (such as Figure 8 shown), using the control method of combining open and closed loops and combining positive and negative feedback, the control target of this set of acrobatic movements is decomposed into 15 stages of control targets through the program, as shown in Figure 9 As shown, and fifteen sub-controllers corresponding to fifteen stage-by-stage control targets are set, the method s...
Embodiment 2
[0120] Such as Figure 10-11 As shown, an underactuated double pendulum system pendulum bar acrobatic movement control method uses the underactuated double pendulum system and the controller to decompose and control the programmed second set of acrobatic movements through the program as follows:
[0121] 1) Decomposition of control targets for a complete set of acrobatic movements
[0122] For the second set of complete sets of acrobatic movements controlled by the computer, according to the sequence of their movements (such as Figure 10 shown), using the control method of combining open and closed loops and combining positive and negative feedback, the control target of this set of acrobatic movements is decomposed into 15 stages of control targets through the program, as shown in Figure 11 As shown, and fifteen sub-controllers corresponding to fifteen stage-by-stage control targets are set, the method steps of decomposing a complete set of acrobatic action control targets...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com