Running gear of height-adjustable independent displacement crawler type pipeline robot
A pipeline robot and walking mechanism technology, applied in the field of mechanical transmission, can solve the problems of not being able to enter flat rectangular pipelines and high heights, and achieve the effect of increasing management and maintenance troubles and increasing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
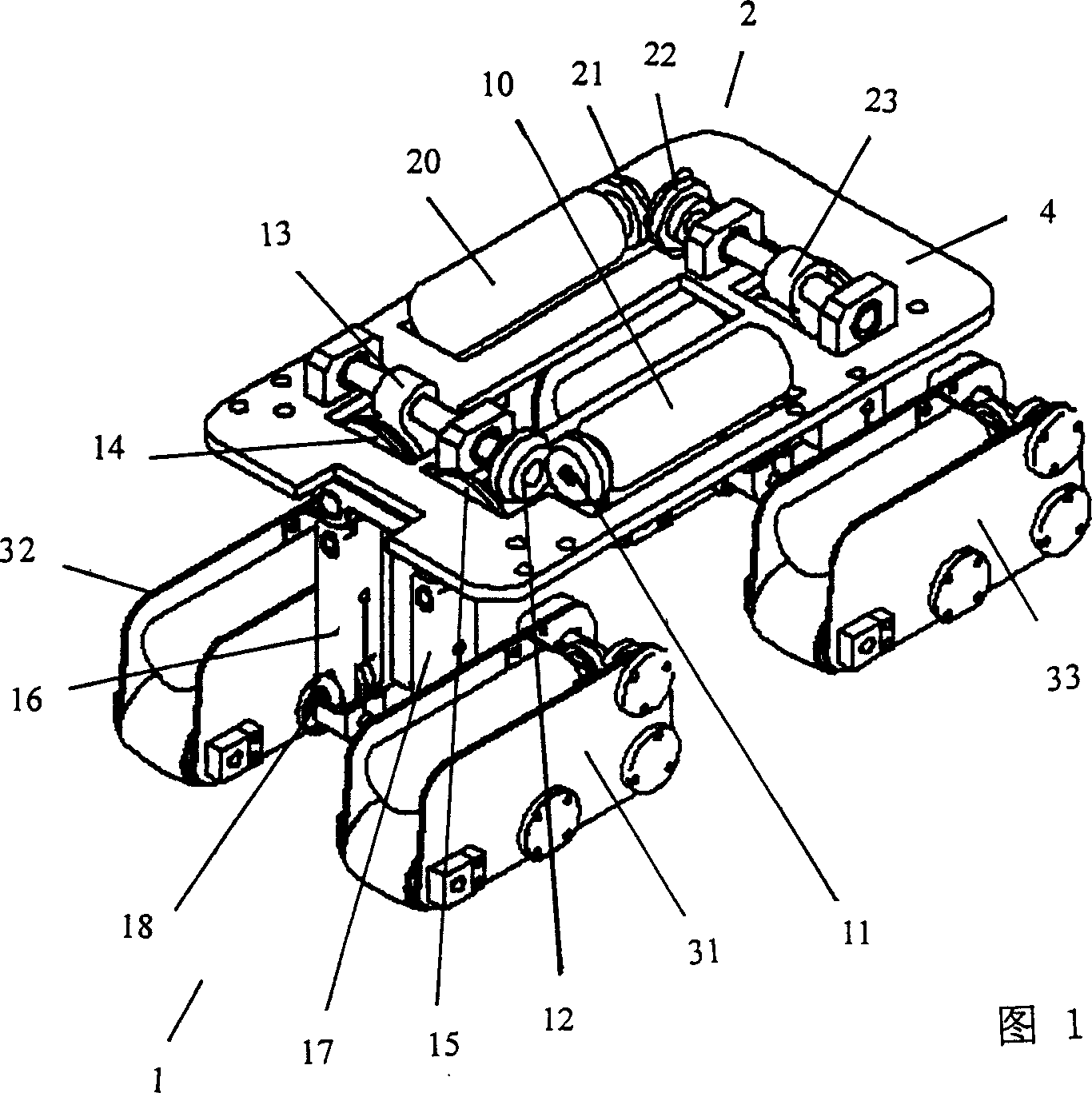
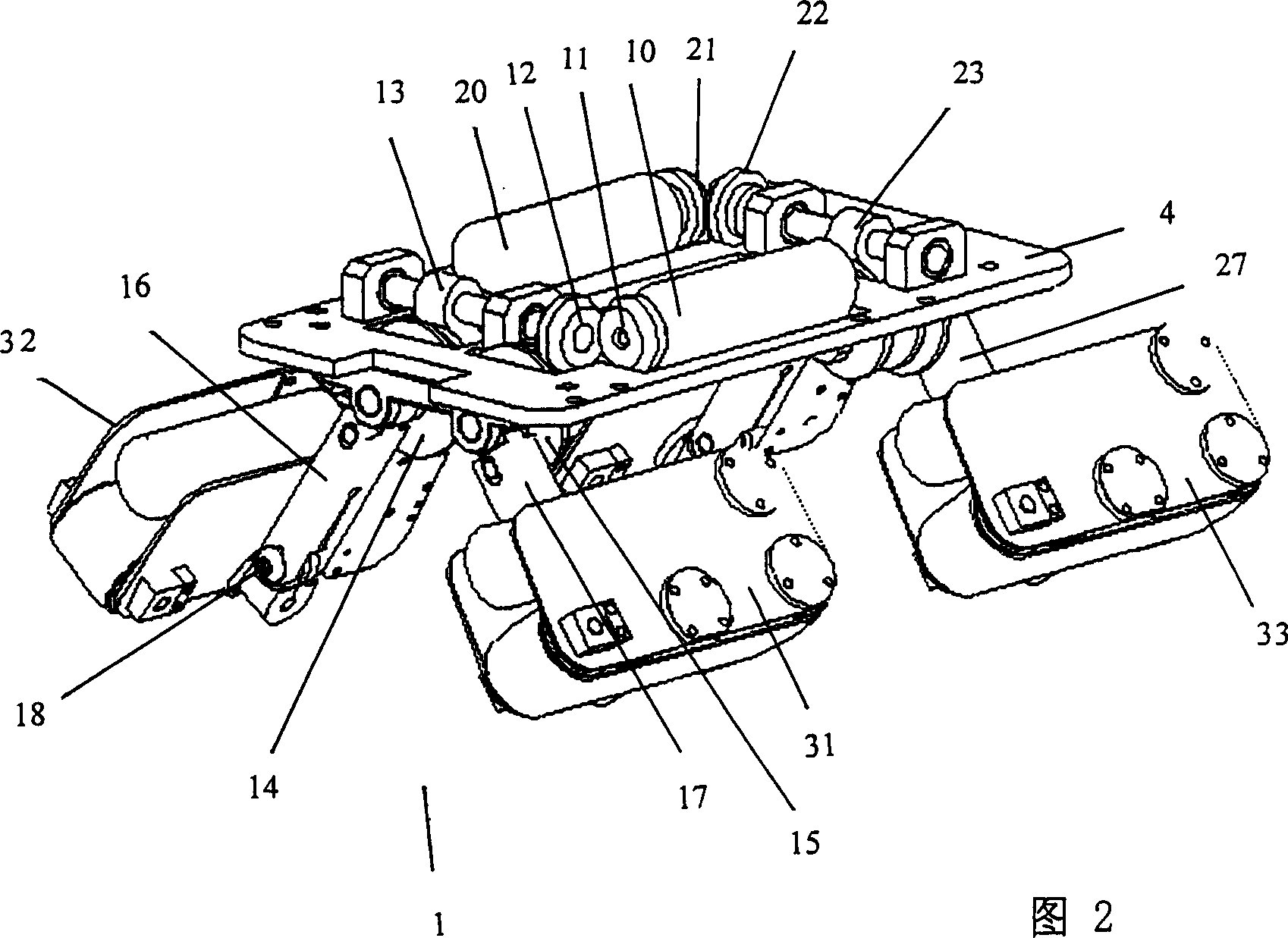
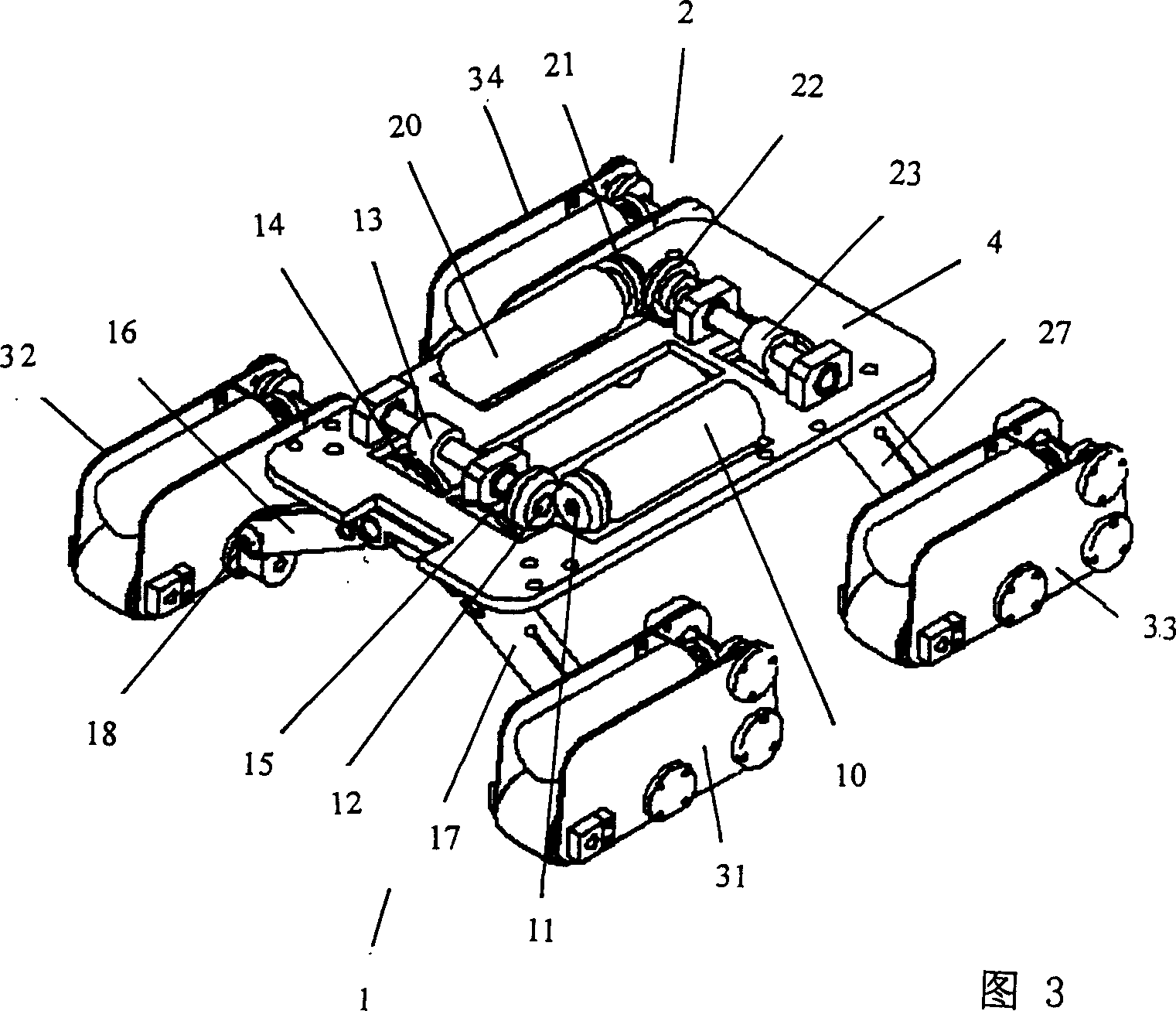
[0014] The main technical parameters of the height-adjustable self-displacement crawler-type pipeline robot walking mechanism: the length and width of the body 4 are 220mm and 140mm respectively. Multi-core cable length 25m. The track foot length and width are 110mm and 32mm, respectively. The length of each leg is 65mm. The length of each swing leg adjustment joint is 12mm. When the robot was upright in the normal state, the height of the robot was 90mm (from the ground to the upper plane of the body 4), and the distance between the left and right crawlers was 95mm. When the robot is in a low state, that is, the four legs are horizontally opened (opening angle 140 °), and the four crawler feet are upright, the height of the robot is reduced to 62mm (the upper plane of the ground to the body 4), and the distance between the left and right crawlers is 210mm. The overall height is reduced by almost a third. The drive motors of the crawler feet and swing legs are 11W, 48V DC ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com