


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Multi-degree-of-freedom modular finger and modular reconfigurable multi-fingered dexterous hand
A modular, degree-of-freedom technology, applied in manipulators, manufacturing tools, chucks, etc., can solve the problems of non-adjustable working space, single configuration structure, less freedom of fingers, etc., to achieve strong adaptive grasping ability and flexibility Strong, reducing the effect of finger volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
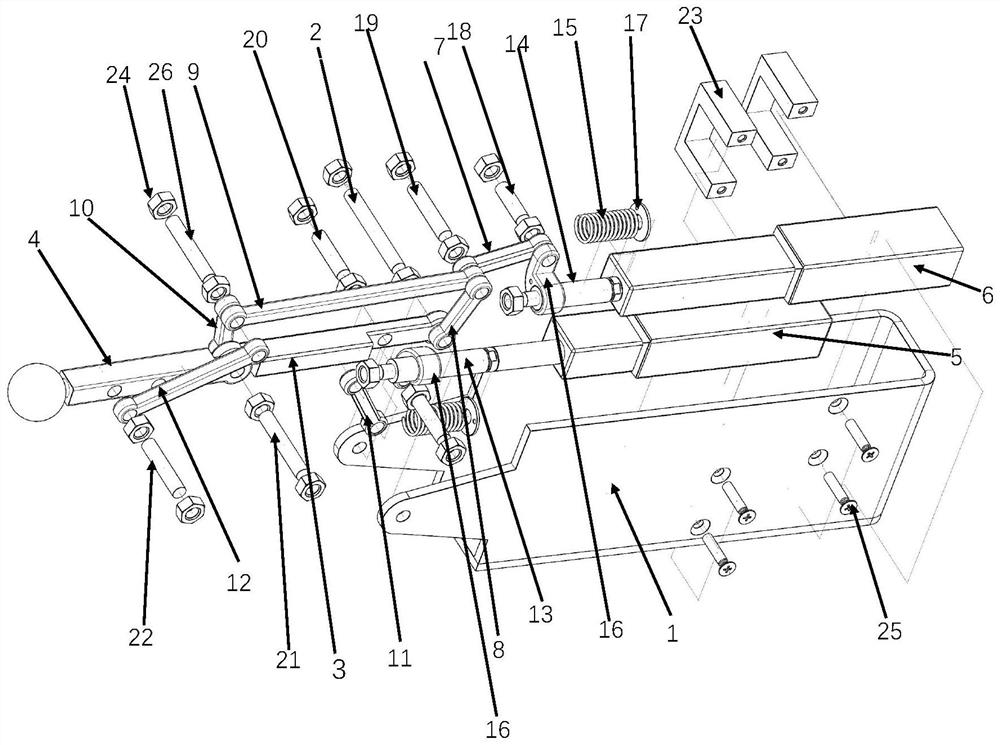
[0165] A multi-DOF modular finger such as figure 1 shown, each finger is of a modular design with the same structure. The finger is composed of a first joint unit, a second joint unit, a driving system and an end finger. Each finger includes two joint units, namely the first joint unit and the second joint unit, each joint unit is driven by a separate motor, the transmission mechanism adopts the link transmission, and each joint unit can be rotated under the action of the driving motor , which controls the 2DOF position of the end finger. The structure of fingers is figure 2 and Figure 4 As shown, each part of the parts is the single-finger finger shell 1, the main shaft 2, the first joint output rod 3, the second joint output rod 4, the first motor 5, the second motor 6, the first connecting rod 7, the second connecting rod Rod 8, third link 9, fourth link 10, fifth link 11, sixth link 12, first spring shaft 13, second spring shaft 14, two springs 15, two adapter rods 1...
Embodiment 2
[0174] More preferably, another multi-DOF modular finger such as Figure 9 As shown in the figure, firstly, in order to improve the force transmission performance, strength and rigidity of the modular fingers, the joints of the fingers are designed with a biaxial link, which can also increase the positioning accuracy of the modular fingers; Grasping envelope range, improve finger grasping ability, a connecting rod of the second joint (a straight rod in embodiment 1) is designed as a curved rod, which can significantly improve the grasping envelope range of the second finger joint. The finger consists of a first joint unit, a second joint unit, a drive system and an end finger. The structure of fingers is Figure 10 As shown, each part of the parts is the single-finger finger shell 1', the main shaft 2', the first joint output rod 3', the second joint output rod 4', the first motor 5', the second motor 6', the seventh joint rod 30, eighth link 31, ninth link 32, tenth link 33...
Embodiment 3-1
[0183] A three-fingered dexterous hand, such as Figure 13 As shown, it consists of a palm and three fingers distributed at 120°. The palm consists of a three-fingered hand side plate 56 and a three-fingered hand hexagonal cover plate 57. Each finger has two degrees of freedom, and the whole hand has a total of six degrees of freedom.
[0184] The three fingers are evenly distributed in the palm of the dexterous hand, and its structure is characterized in that it is composed of a three-fingered hand side plate 56 and a three-fingered hand hexagonal cover plate 57. The angular cover is installed above the 6 three-fingered hand side panels arranged in a regular hexagon, acting as the palm. When grasping, keep the palm still and rely on three fingers to grasp. Mounting holes are designed on the side plate of each three-finger hand, and mounting holes are also reserved on the shell of the single-finger finger, and each finger is fixed on the palm with a cross-recessed countersunk...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com