


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Sequence image state expression-based spacecraft autonomous navigation robust filtering algorithm
A sequential image and autonomous navigation technology, applied in navigation computing tools, image analysis, integrated navigators, etc., can solve problems such as state estimation and truncation errors, and achieve the effect of reducing approximate errors and simple and feasible measurement methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
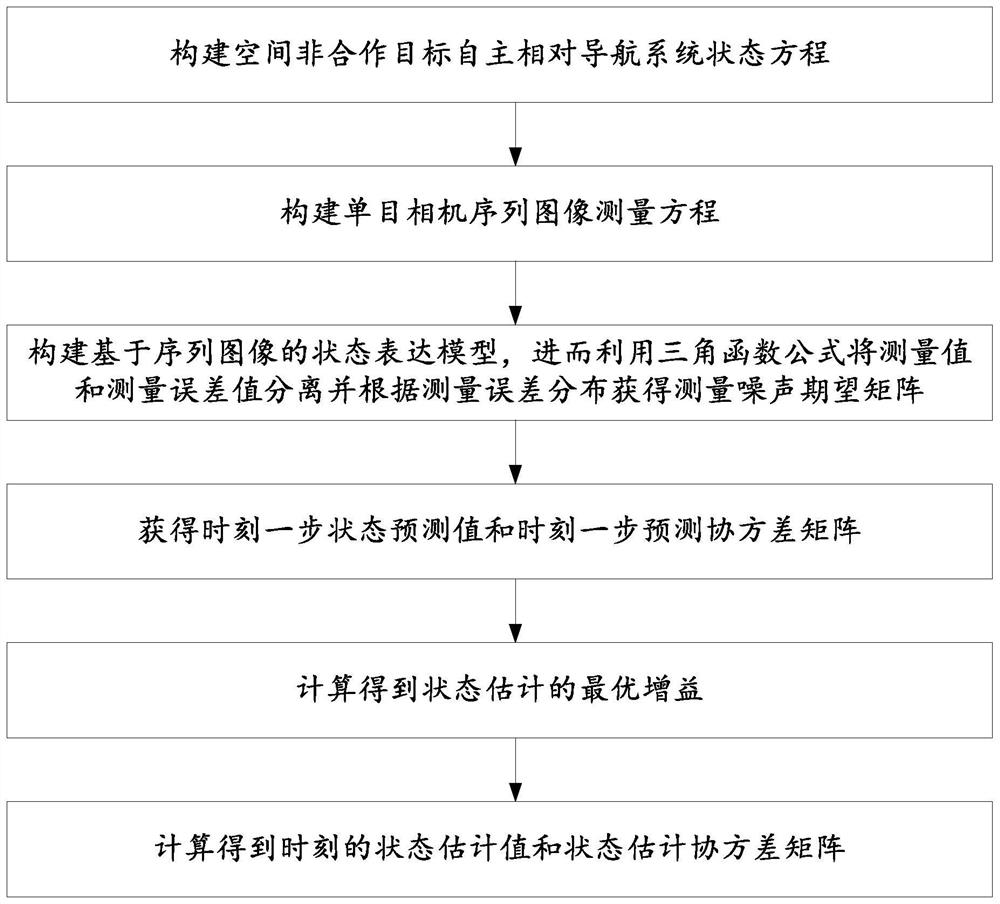
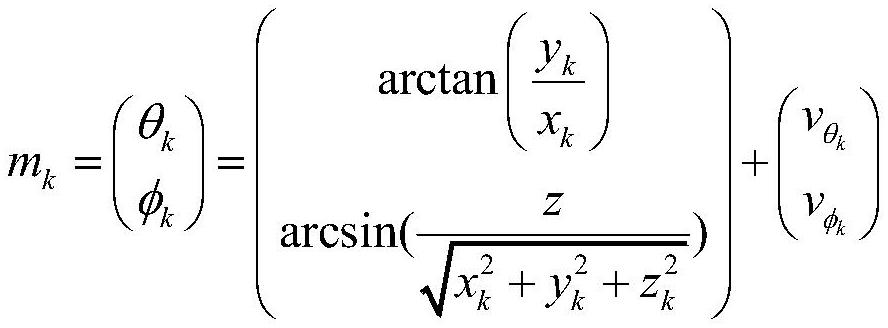
[0153] The main steps are summarized as follows: (1) Taking the relative position and relative velocity of the space non-cooperative target and the serving spacecraft as state variables, according to the law of relative orbital dynamics, combined with the orbital maneuvering momentum of the serving spacecraft, construct a relative orbital dynamics model; (2) Since it is difficult to achieve state estimation with a single image, it is necessary to use orbital maneuvering to cooperate with the sequence images of the monocular camera, and use the target observation angle obtained from the sequence images as the measurement variable to build a measurement model for the sequence image of the monocular camera; (3) Combining the state variables of (1), the measurement model of (2) is transformed, and the state expression model based on the sequence image is constructed by using the sequence image measurement data, and then the measurement value and the measurement error value are separ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com