Mechanical arm task planning system based on behavior tree and application method
A technology of manipulators and behaviors, applied in manipulators, program-controlled manipulators, comprehensive factory control, etc., can solve problems such as inability to dynamically adapt to the environment, low efficiency, and long cycles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to clarify the technical content of the present invention more clearly, the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments, wherein the specific embodiments and descriptions are only used to explain the present invention, but are not intended to limit the present invention.
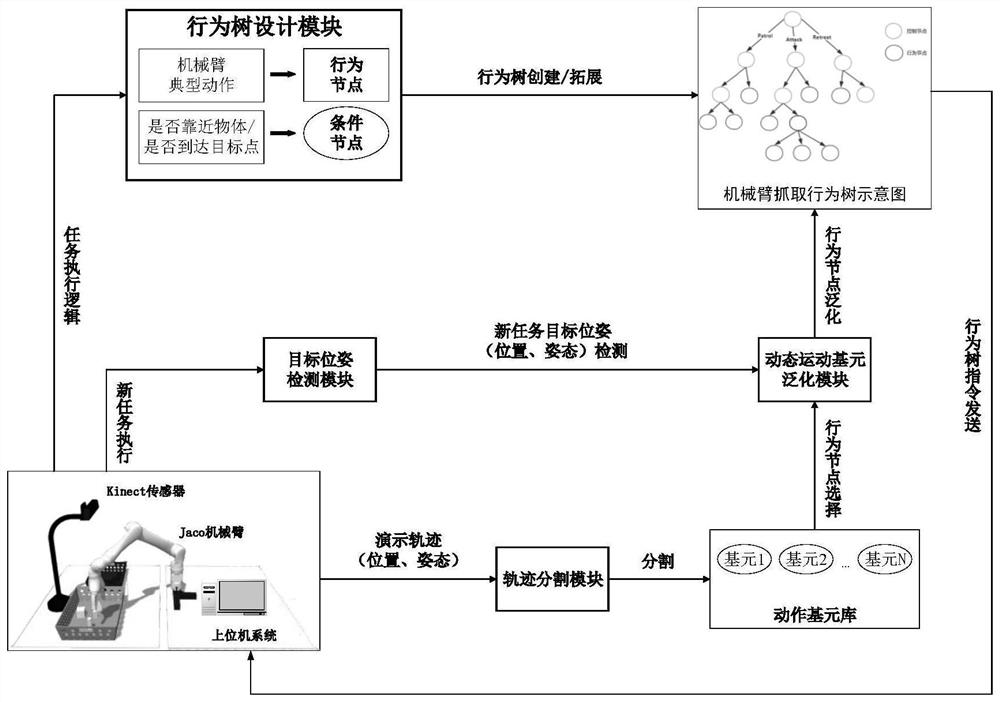
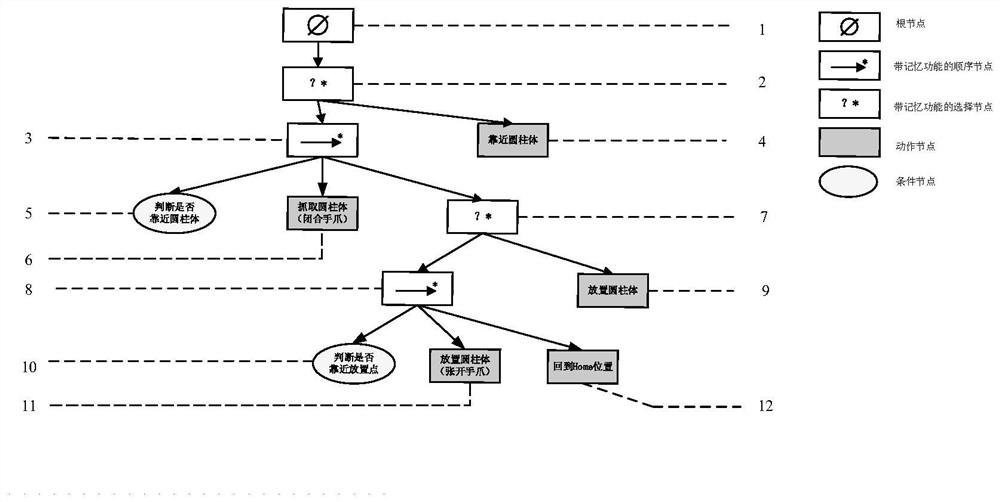
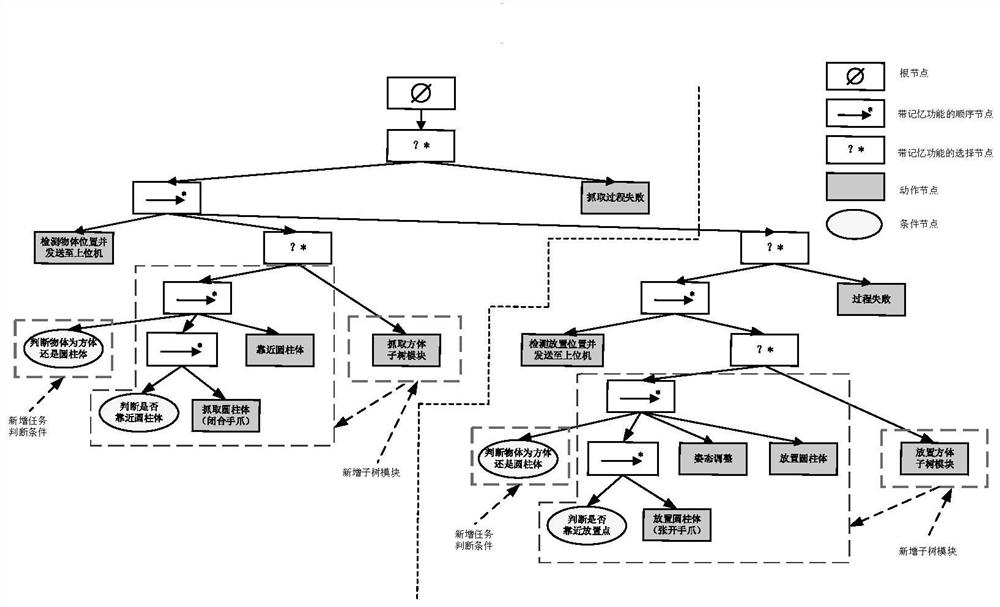
[0045] The present invention proposes a task planning method for a robotic arm based on a behavior tree, and its overall structure is as follows figure 1 shown. It mainly includes two parts: upper-level task planning and new task execution. The schematic diagram of the behavior tree structure designed in the upper-level task planning is as follows figure 2 shown. The main implementation scheme is: on the one hand, use the teleoperation to control the Kinova Jaco manipulator to perform multiple grasp task demonstrations, obtain the action primitives from the collected demonstration data through the trajectory segme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com