Real-time tracking aiming type unmanned aerial vehicle interference method
A real-time tracking and unmanned aerial vehicle technology, applied in the direction of communication interference, electrical components, etc., can solve the problems of large interference bandwidth, high transmission power, low interference efficiency, etc., and achieve the effect of light weight and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
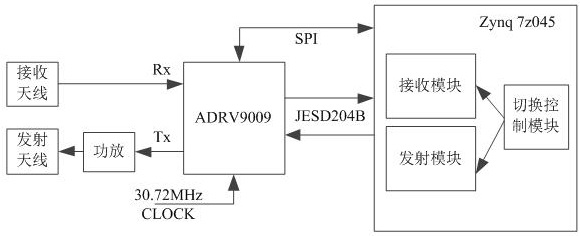
[0075] This embodiment proposes a real-time tracking and targeting UAV jamming method, based on real-time tracking and targeting UAV jammers; figure 1 , figure 2 As shown, the real-time tracking and targeting UAV jammer includes a receiving antenna, a transmitting antenna, a power amplifier module, an agile frequency module, an FPGA unit, and a reference clock signal module;
[0076] The FPGA unit includes a data processing module, a switching control module, a receiving module, a transmitting module, a local interference signal generation module, and a forwarding interference signal module;
[0077] The data processing module is connected to the receiving module, the local interference signal generation module, the forwarding interference signal module, the switching control module, and the frequency agility module; the data processing module is connected to the transmitting module through the local interference signal generation module and the forwarding interference signal...
Embodiment 2
[0088] In this embodiment, on the basis of the above-mentioned embodiment 1, in order to better realize the present invention, further, the local interference signal generating module includes two DDS chips arranged in parallel;
[0089] In the step 5, the interference signal generated by the local interference signal generation module is a specific generation method of a chirp signal: adopt two parallel DDS chips to generate the required chirp signal; two DDS chips The parameter setting method is as follows:
[0090] For a single DDS chip, define the instantaneous frequency of generating a chirp signal as Freq[n], and the starting frequency as f 0 , the frequency change step is f Δ , the step size is t, and the sampling rate is recorded as f s ; The calculation formula of Freq[n] for the instantaneous frequency is as follows:
[0091] Freq[n] = f 0 + f Δ *mod(n,t);
[0092] Where mod(n,t) means to take the remainder when n is divided by t;
[0093] Then the normalized ...
Embodiment 3
[0110] In this embodiment, on the basis of any one of the foregoing embodiments 1-2, in order to better realize the present invention, further, a RAM chip is provided in the forwarding interference signal module;
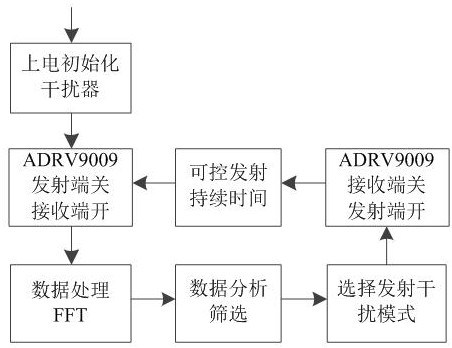
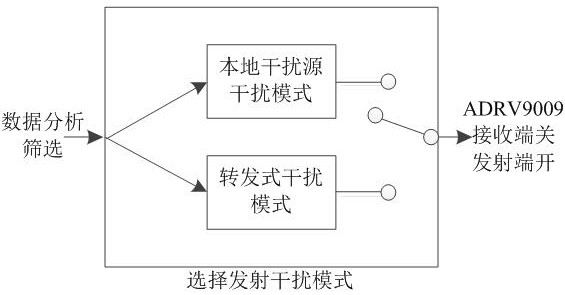
[0111] In the step 5, the specific operation of using the forwarding interference signal module to generate the baseband signal of the interference signal is: when the data processing module of the FPGA unit performs the fast Fourier transform FFT of step 4, use the RAM chip to synchronize the current processing data Store, and judge whether the currently received signal data is a UAV communication signal; if it is judged that the currently received signal data is a UAV communication signal, then stop modifying the data in the RAM chip and store it in the RAM chip The data is sent into the air through the transmitting antenna as a jamming signal.
[0112] Other parts of this embodiment are the same as those of any one of Embodiments 1-2 above, so details are not rep...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com