Aircraft track rapid planning method based on improved Dijkstra algorithm
An aircraft and track technology, applied in the field of aircraft track rapid planning, can solve problems such as inability to break through the basic framework, and achieve the effects of reducing time complexity, improving slack, and high operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
[0076] The present invention proposes a method for fast planning of aircraft track based on the improved Dijkstra algorithm, and the specific process is as follows:
[0077] 1. UAV track planning model
[0078] 1.1 Model establishment
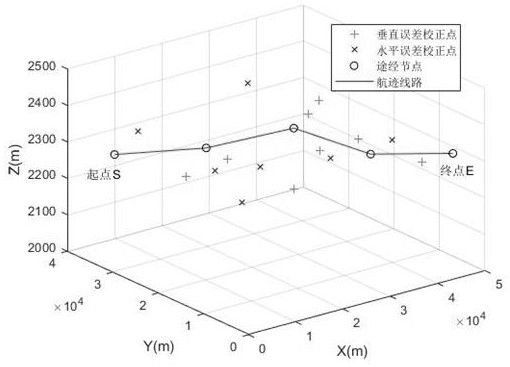
[0079] The intelligent unmanned aerial vehicle is performing a material transportation mission, when it reaches the node S , due to unexpected weather conditions, it is impossible to continue flying according to the pre-planned route. At this time, the aircraft needs to quickly plan a path that can reach the end point smoothly during the travel process. E path of. The three-dimensional flight area map is as follows figure 1 shown. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com