Odometer parameter calibration method based on single position datum point
A parameter calibration and odometer technology, which is applied in the field of inertial navigation, can solve the problems of high requirements for docking reference points and the inability to achieve fast and convenient calibration of odometer parameters, and achieve the effects of high-precision positioning, easy implementation and high precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
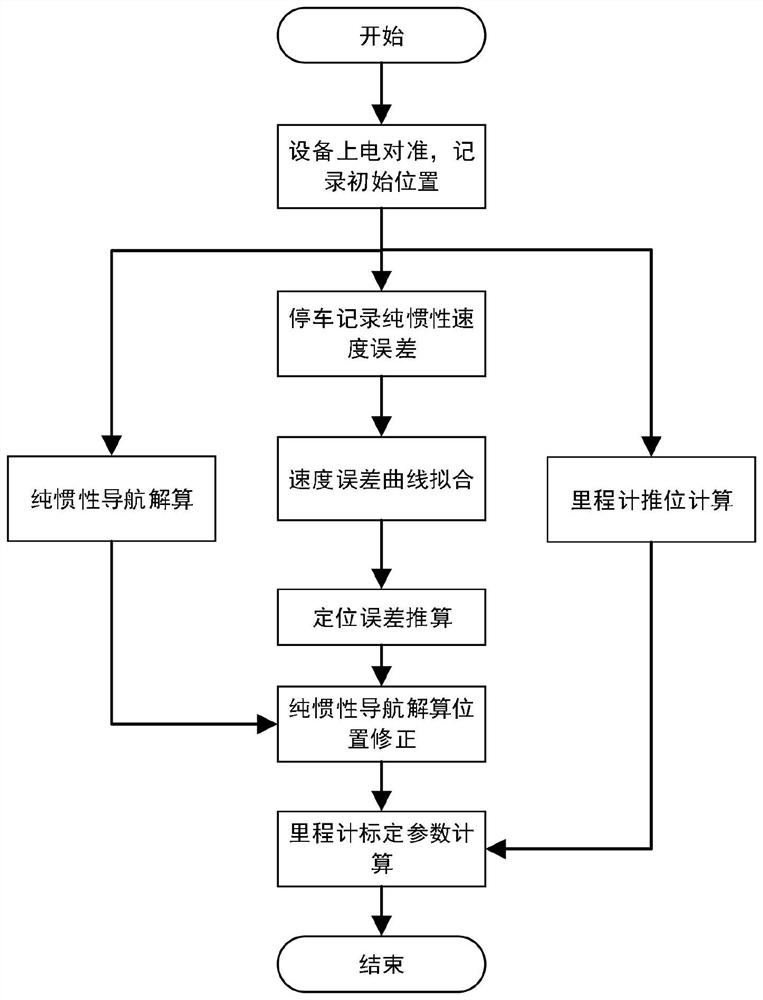
[0049] An odometer calibration method based on a single-position reference point, such as figure 1 shown, including the following steps:
[0050] Step 1. Convert the odometer signal from the odometer coordinate system to the inertial navigation device coordinate system, and perform the odometer push calculation.
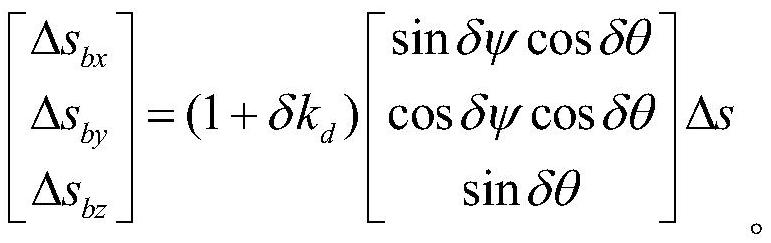
[0051] In this step, if the odometer and the inertial navigation device perform integrated navigation, it is necessary to model the error model of the odometer. The conventional odometer error model includes three parameters, which are the odometer scale factor δk d , azimuth installation error δψ and pitch installation angle error δθ.
[0052] The present invention converts the odometer signal ΔS (displacement increment) from the odometer coordinate system d system (satisfies the definition of the right-handed coordinate system, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com