Method for automatically acquiring feature point parameters of target object
A target object and feature point technology, applied in the computer field, can solve the problem of low efficiency of feature point parameters, and achieve the effect of improving data processing efficiency, ensuring quality, and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
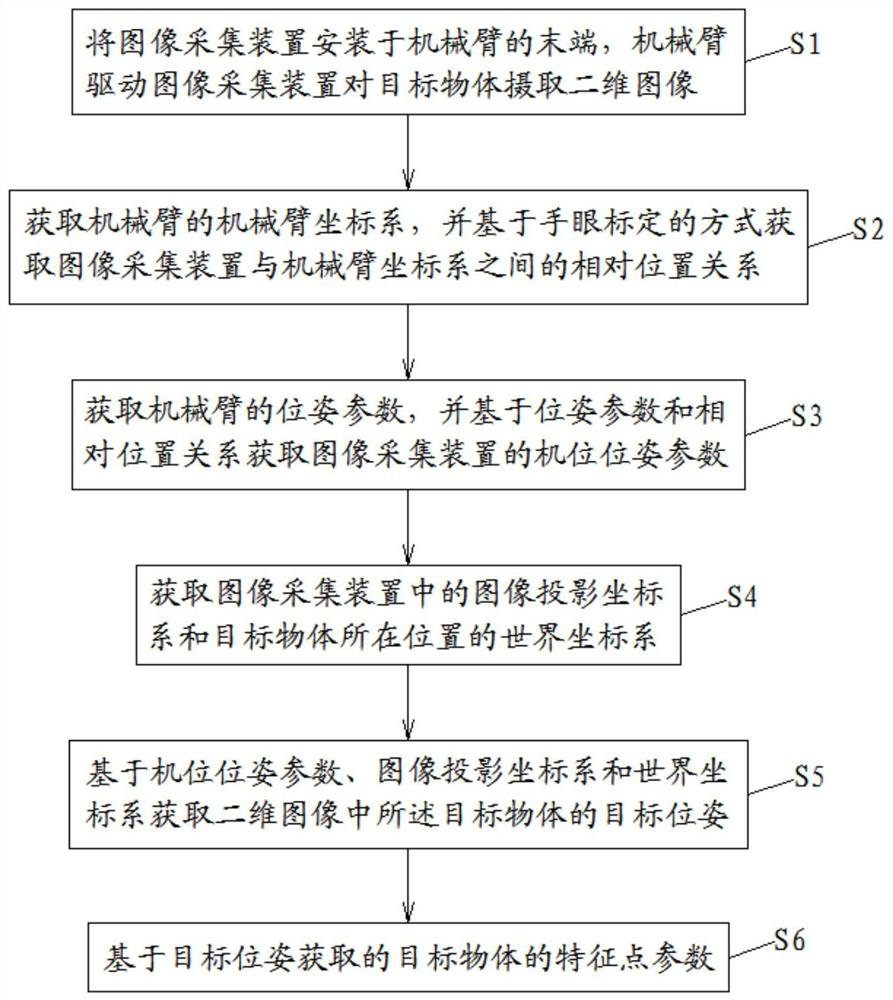
[0028] Such as figure 1 As shown, according to an embodiment of the present invention, a method for automatically obtaining the feature point parameters of the target object of the present invention includes the following steps:
[0029] S1. Install the image acquisition device on the end of the robotic arm, and the robotic arm drives the image acquisition device to capture a two-dimensional image of the target object;
[0030] S2. Acquire the mechanical arm coordinate system of the mechanical arm, and acquire the relative positional relationship between the image acquisition device and the mechanical arm coordinate system based on hand-eye calibration;
[0031] S3. Obtain the pose parameters of the mechanical arm, and obtain the pose parameters of the image acquisition device based on the pose parameters and the relative positional relationship;
[0032] S4. Obtain the image projection coordinate system in the image acquisition device and the world coordinate system where th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com