Efficient pruning robot for needle-leaved trees
A technology of robots and trees, applied in agricultural machinery and tools, cutting tools, cutting equipment, etc., can solve problems such as high work intensity and dangerous branches
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0025] The present invention will be further elaborated below in conjunction with the accompanying drawings and specific embodiments.
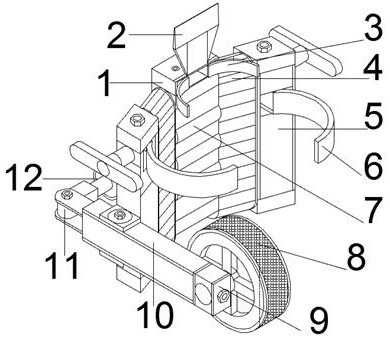
[0026] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 and Figure 7 As shown, a robot for efficient pruning of coniferous trees includes a frame body 1, a cutter 2, a guide claw 3, a climbing track 4, an outer frame body 5, a clamping claw 6, a guide roller 7, and a traveling roller 8 , cardan shaft 9, brake arm 10, motion link 11, hydraulic cylinder 12, the cutter 2 is installed vertically based on the bolt at the top of the frame body 1, and the guide claw 3 is installed on the upper end of the frame body 1 using a motor connected to the shaft, based on Climbing crawler belts 4 are arranged on both sides of the frame body 1, and an outer frame body 5 is positioned on the outer side of the climbing crawler belt 4. Based on the outer frame body 5, clamping claws 6 are installed at intervals in the upper and l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com