Intelligent lifesaving system based on GPS cruising and attitude resolving and control method
A technology of GPS module and attitude, which is applied in GPS use, water lifesaving, navigation aid arrangement, etc. It can solve the problems of difficulty in guaranteeing rescue efficiency, too many parameters, and few professional personnel.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
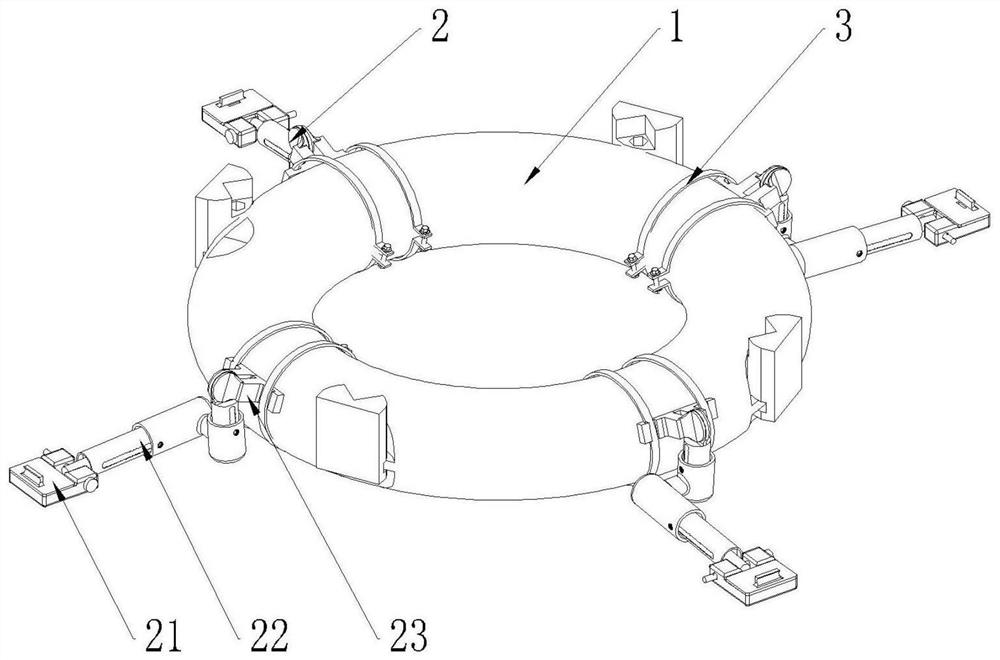
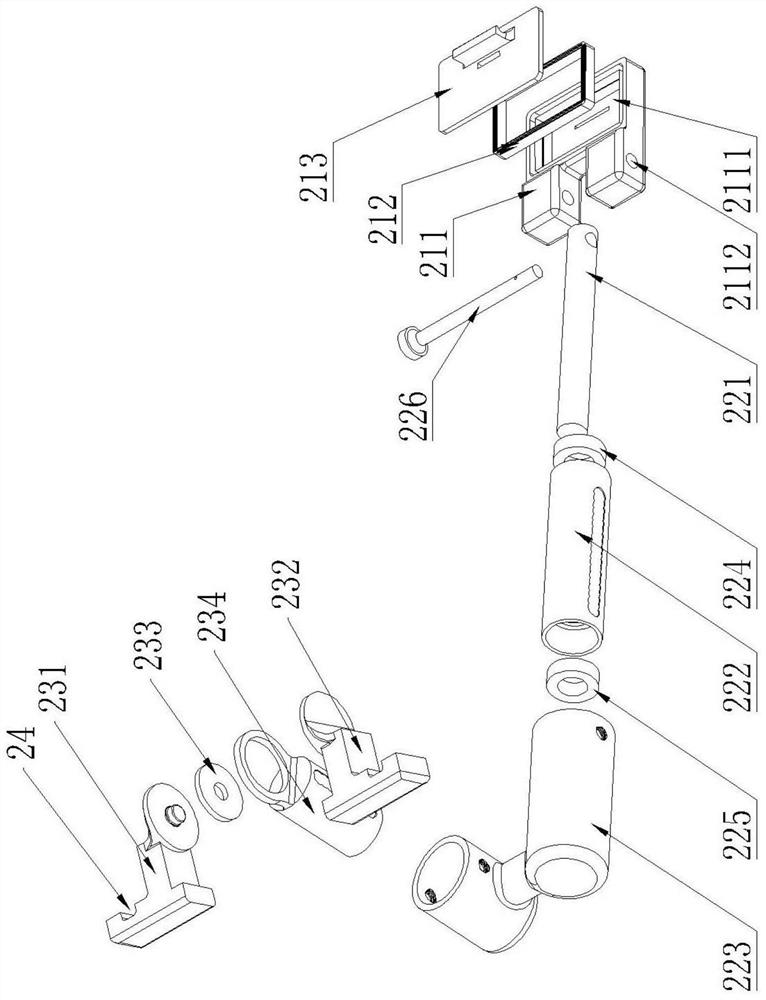
[0065] Such as Figure 1-2 As shown, this embodiment relates to an intelligent lifesaving system based on GPS cruising and attitude calculation, including a lifebuoy 1, a plurality of mechanical arms 2 arranged on the lifebuoy 1, and a main control module.
[0066] Wherein, each mechanical arm 2 is provided with a gyroscope module electrically connected to the main control module, which is used to collect water ripple data and analyze the amplitude and frequency of water ripple in real time.
[0067] The gyroscope module is electrically connected to an attitude calculation module, and the attitude calculation module is electrically connected to the main control module to obtain the pitch angle and roll angle of the gyroscope module, and obtain the position of the vibration source through a wave detection and positioning algorithm.
[0068] The life buoy 1 is provided with a GPS module electrically connected to the main control module, and the main control module controls the l...
Embodiment 2
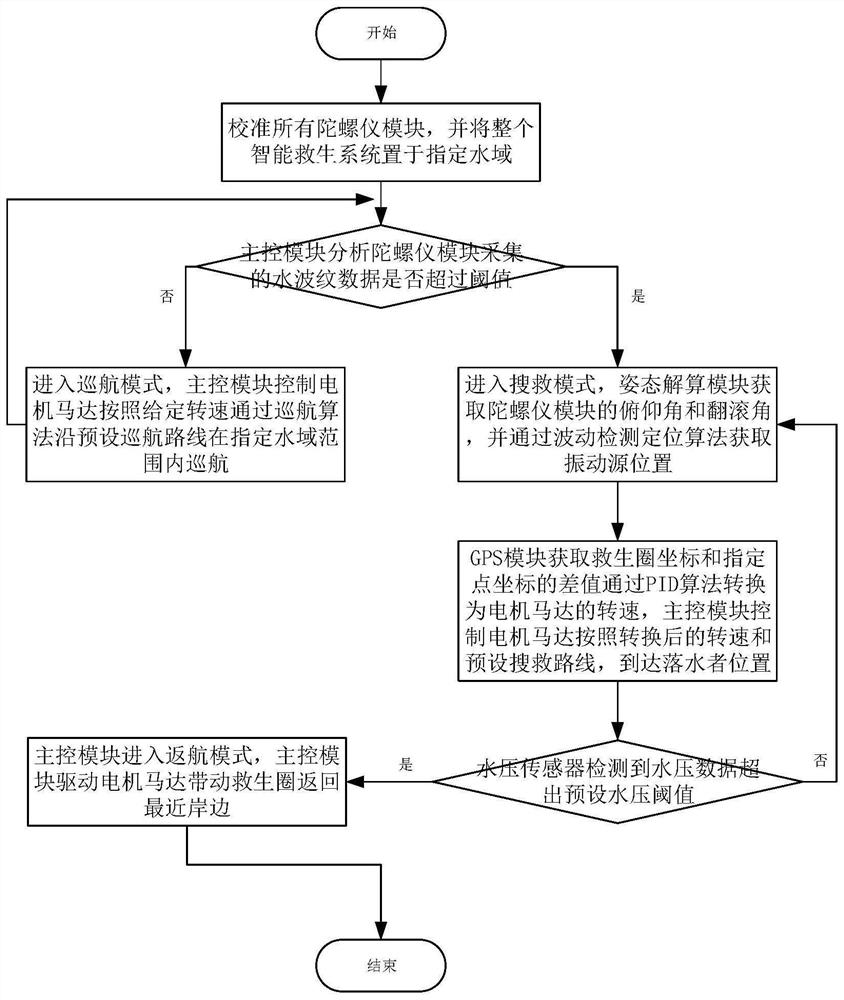
[0085] see Figure 1-3 As shown, a control method of an intelligent lifesaving system based on GPS cruise and attitude calculation includes the following steps:
[0086] A1. Calibrate all gyroscope modules and place the entire intelligent lifesaving system in designated waters;
[0087] A2, the main control module analyzes whether the water ripple data collected by the gyroscope module exceeds the threshold, if not, enter step A3, otherwise, enter step A4;
[0088]A3. Enter the cruising mode, the main control module controls the motor to cruise within the specified water area along the preset cruising route through the cruising algorithm according to the given speed, and return to step A2;
[0089] A4. Entering the search and rescue mode, the attitude calculation module obtains the pitch angle and roll angle of the gyroscope module, and obtains the position of the vibration source through the fluctuation detection and positioning algorithm;
[0090] A5. The difference betwee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com